

Target positioning and identifying method and system for underwater robot
An underwater robot and target positioning technology, which is applied in radio wave measurement systems, instruments, and sound wave re-radiation, etc., can solve the problems of increasing the workload of underwater robots, consuming a lot of energy, and not raising them, and reducing the amount of data processing. , the effect of reducing manufacturing costs and improving battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
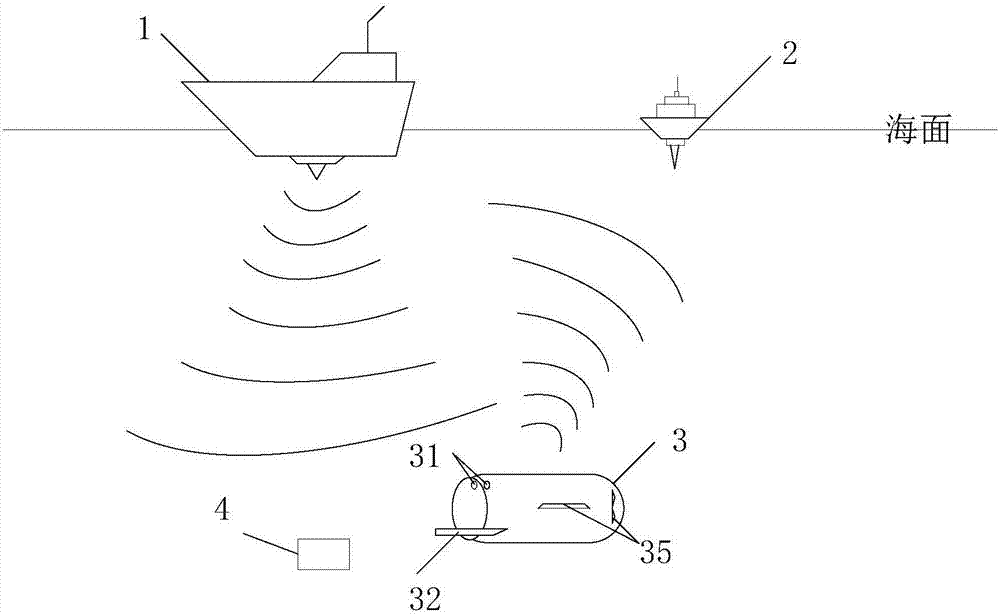
[0039] Embodiment 1 of the present invention provides an underwater robot target positioning and recognition system, such as figure 1 As shown, the system includes a mother ship 1 with active sonar function, at least one miniature unmanned ship 2 with passive sonar function and underwater robot 3, wherein the number of miniature unmanned ships can be two or more specifically, The increase in the number of micro unmanned ships can improve the accuracy of the calculation of the final target object positioning information to a certain extent.
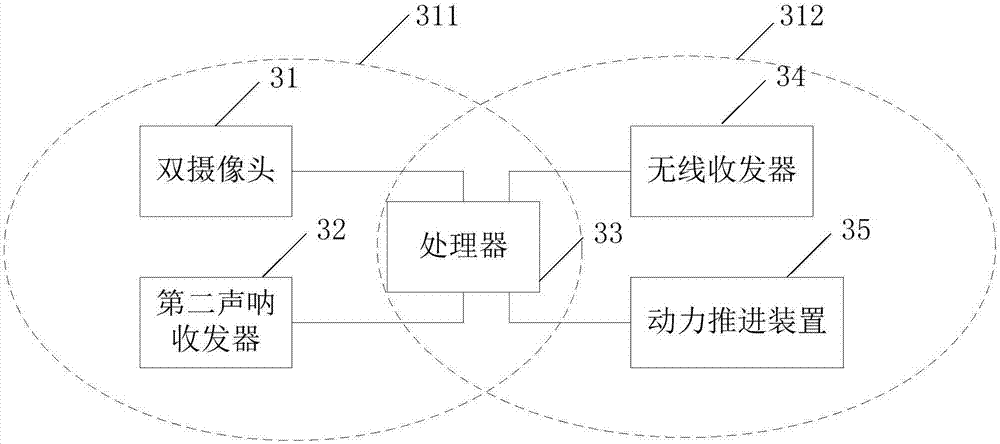
[0040] The underwater robot 3 is provided with a target recognition subsystem 311 and a control subsystem 312 (such as figure 2 shown), the target recognition subsystem 311 is used to obtain the first position information of the target object 4 relative to the underwater robot 3; the control subsystem 312 has established a first communication link with the mother ship 1, and through The first communication link sends the first location i...
Embodiment 2
[0048] The embodiment of the present invention is a system combination form of the solution described in embodiment 1 in a specific implementation occasion. In this embodiment, the specific number of the micro unmanned ship 2 is one, and the underwater robot 3 is provided with a depth sensor. Under normal circumstances, water depth sensors exist as the standard configuration of most underwater robots. Of course, it is not ruled out that some underwater robots for shallow water operations or some underwater robots for specific seabed operations will, out of cost considerations, pass The water depth sensor is removed in a customized manner. Therefore, the present embodiment reduces the number of miniature unmanned ships required in the system to a minimum (that is, a miniature unmanned ship) on the basis of utilizing the functions of the depth sensor of the underwater robot itself. Such as Figure 4 As shown in this implementation, the system includes a mother ship 1 with an a...
Embodiment 3
[0057] The embodiment of the present invention is a system combination form of the scheme described in embodiment 1 in a specific realization occasion. In this embodiment, the specific number of miniature unmanned ships 2 is two or more (in this embodiment Two examples are used to illustrate). This embodiment is particularly suitable for situations where no water depth sensor is configured in the underwater robot, or where the number of miniature unmanned ships 2 is relatively sufficient and it is desired to obtain more accurate calculation of target object positioning information. In this embodiment, the specific number of miniature unmanned ships 2 is two or more, and the sonar equipment of the two or more miniature unmanned ships 2 and the mother ship 1 is used as a reference point, wherein each The reference points form an equilateral figure on the water surface. Such as Figure 5 As shown in this implementation, the system includes a mother ship 1 with an active sonar f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More