Map building method and robot control system
A map construction and map technology, applied in the computer field, can solve the problems of expensive acquisition of information, large volume and weight, and high price of laser scanners, and achieve the effect of flexible update methods, easy map construction, and realization of map construction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
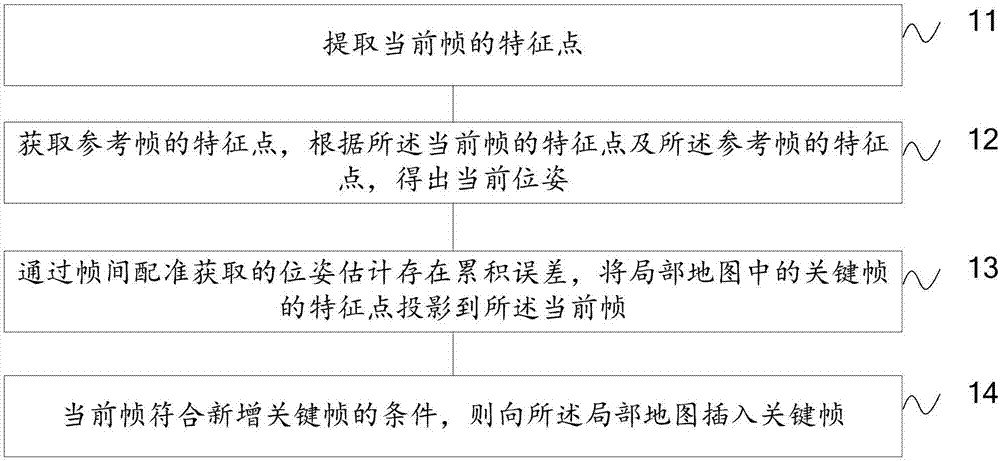
[0071] An embodiment of the present invention provides a map construction method, such as figure 1 As shown, the method includes:
[0072] 11. Extract the feature points of the current frame;
[0073] 12. Obtain the feature points of the reference frame, and obtain the current pose according to the feature points of the current frame and the feature points of the reference frame;
[0074] 13. There is a cumulative error in the pose estimation obtained by inter-frame registration, and the feature points of the key frames in the local map are projected to the current frame;
[0075] 14. When the previous frame meets the condition for adding a key frame, insert a key frame into the partial map.
[0076] Optionally, said extracting the feature points of the current frame includes:
[0077] Adopt ORB (Oriented FAST and Rotated BRIEF) algorithm to detect feature point and calculate the direction of feature point to described current frame, compare and obtain described feature poi...
Embodiment 2
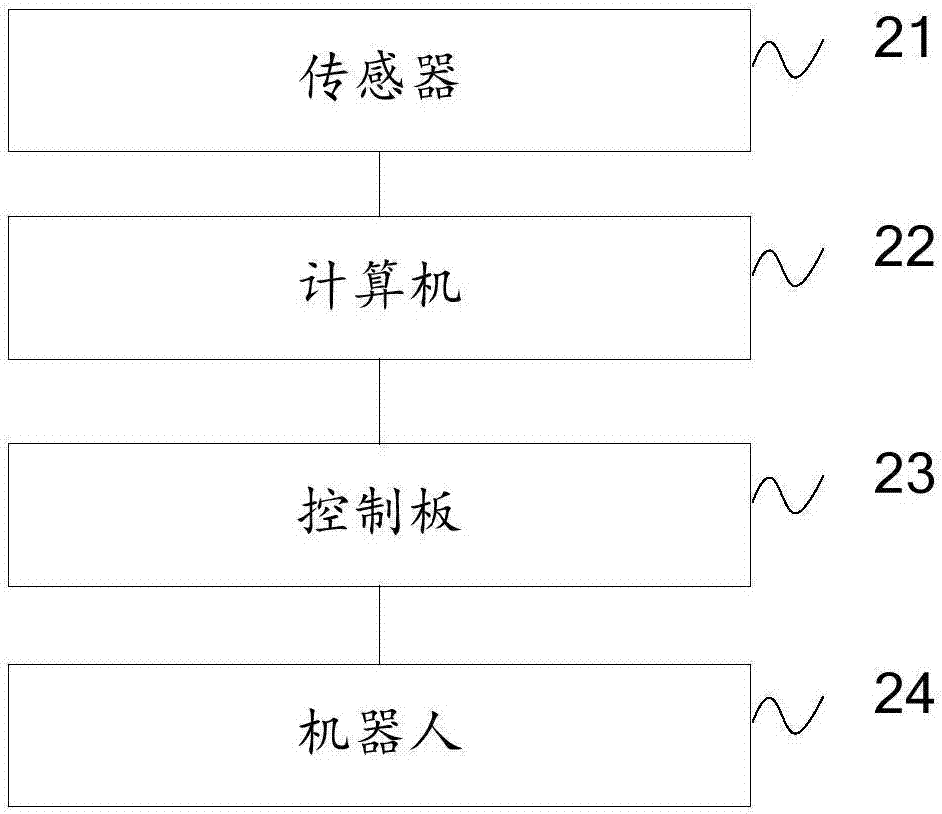
[0128] An embodiment of the present invention provides a robot control system, which can apply the method provided in Embodiment 1 above. Such as image 3 As shown, the system includes: sensor 21, computer 22, control board 23, robot 24;
[0129] The sensor 21 acquires a distance parameter;
[0130] The control panel 23 is used to control the robot;
[0131] The computer 22 is used to perform:
[0132] Extract the feature points of the current frame;
[0133] Obtaining the feature points of the reference frame, and obtaining the current pose according to the feature points of the current frame and the feature points of the reference frame;
[0134] There is a cumulative error in the pose estimation obtained by inter-frame registration, and the feature points of the key frames in the local map are projected to the current frame;
[0135] When the previous frame meets the condition for adding a key frame, insert a key frame into the partial map.
[0136] Optionally, the co...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Width | aaaaa | aaaaa |
| Height | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More