

Medium material recognition method for robot autonomous environment perception
A medium material and environment perception technology, applied in the field of material recognition, can solve the problems of large amount of image data, complex processing, and small amount of data, and achieve the effect of high recognition accuracy, wide recognition range and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0041] This embodiment discloses a medium material identification method for autonomous environment perception of a robot. The specific implementation steps are as follows:
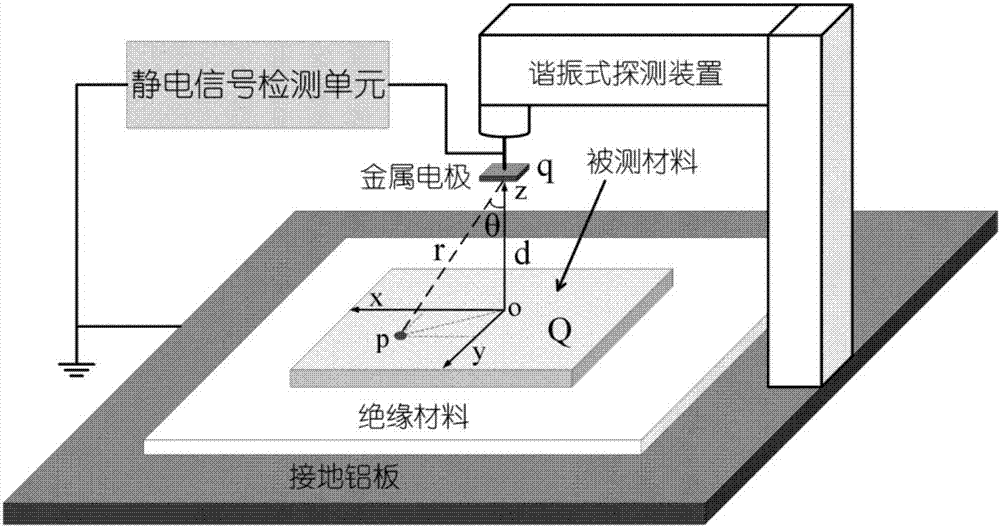
[0042] Step 1: Arrange a resonant detection device to drive the metal electrode to contact and separate from the material to be tested multiple times, and use an electrostatic measurement system to detect the induced current signal generated by the change of the induced charge of the metal electrode. The electrostatic measurement system includes: a resonant detection device, a metal electrode, an electrostatic signal detection unit, a base composed of a measured material, an insulating material and a grounded metal aluminum plate. The electrostatic signal detection unit includes: a current amplification circuit, an f trap, an I-V conversion circuit, and a data acquisitio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More