

Navigation speed and navigation direction cooperative control formation navigation control method based on leader-follower method
A control method and collaborative control technology, applied in two-dimensional position/course control, non-electric variable control, control/adjustment system, etc., can solve the problems of imperfect formation-keeping control methods and poor formation-keeping effects, etc. To achieve the effect of strong engineering operability and implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
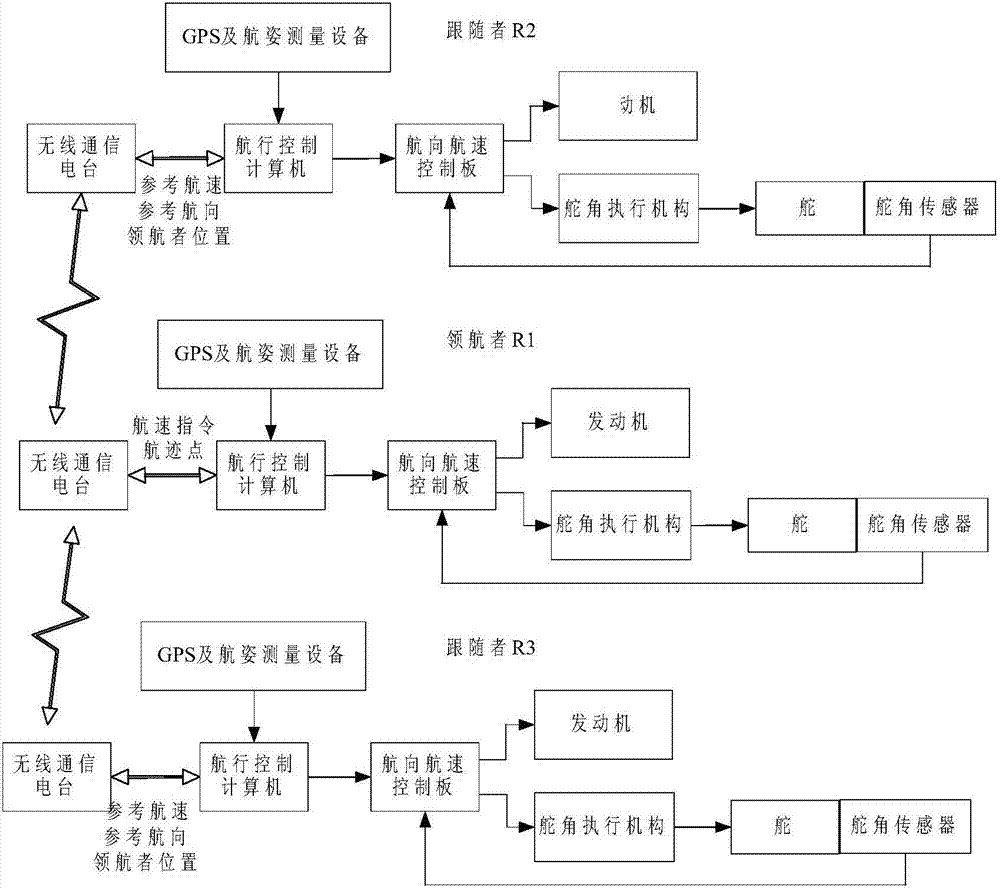
[0042] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
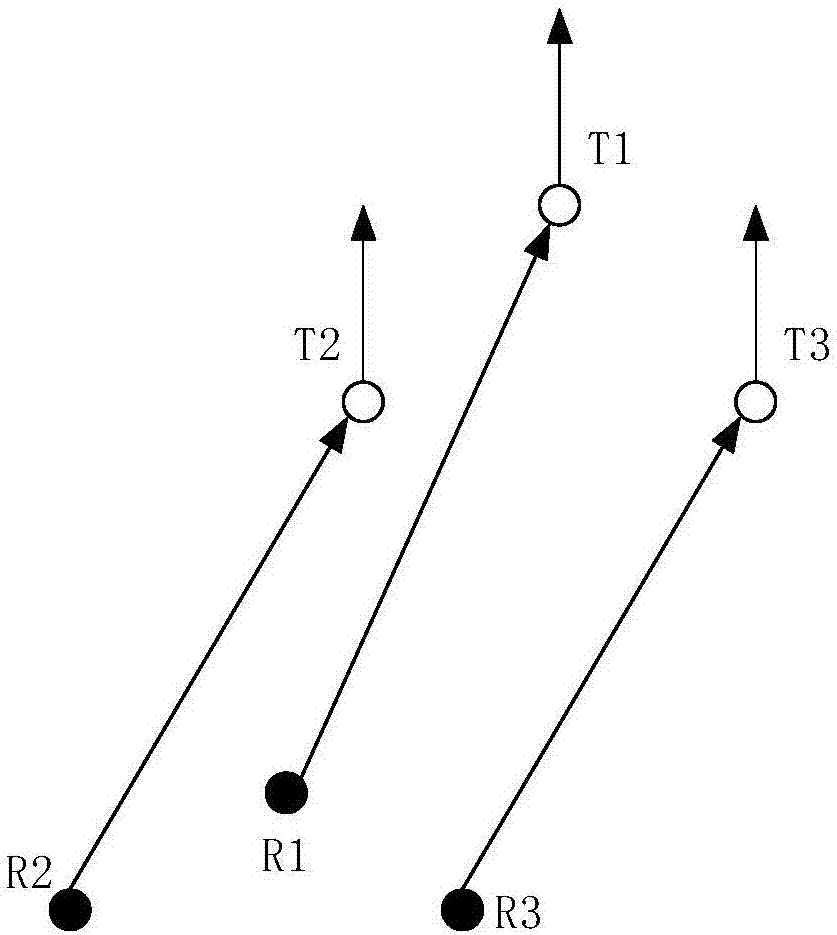
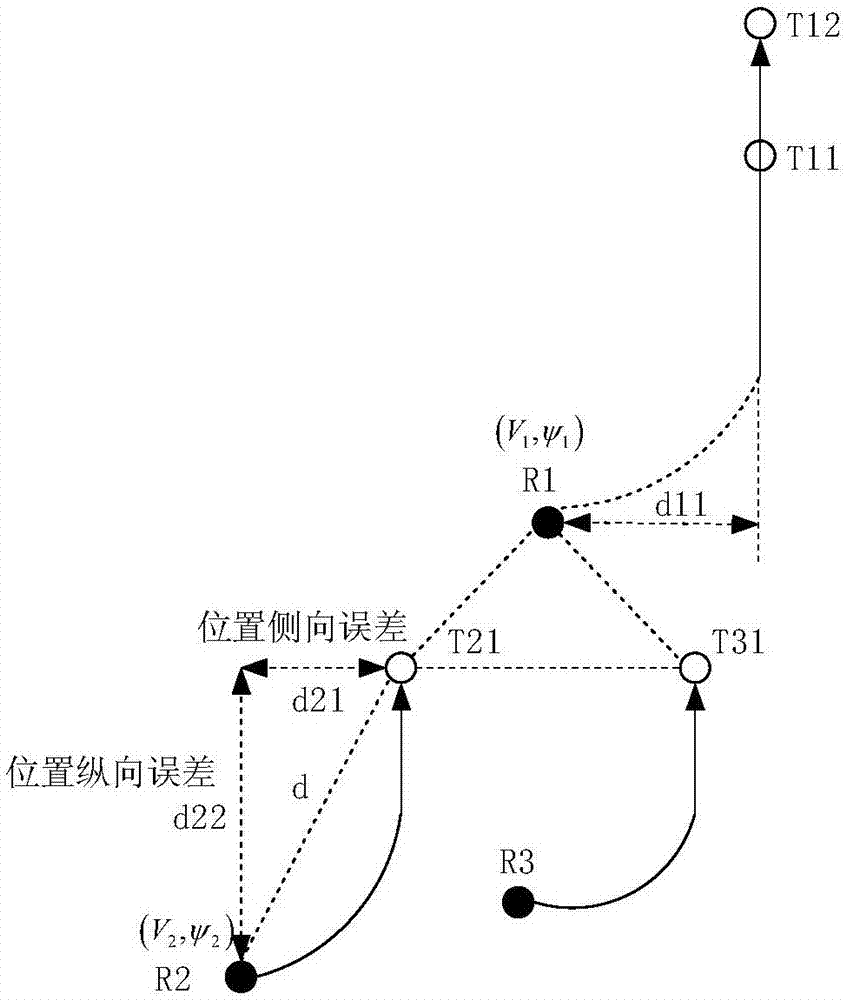
[0043] In order to realize the stable formation navigation control of ships, no matter which specific control method is adopted, it is necessary to adjust the speed and course of the ship, and finally realize the synchronous convergence control of multiple states such as position, speed and course. Only when the synchronous convergence control of position, speed and course is realized at the same time, can the control process of multi-vessel sailing from unready state to ready state and maintain the ready state be realized. The Leader-Follower method is taken as an example. In the formation formation process, when the follower reaches the desired formation position, the follower should have the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More