

Cotton picking robot
A robot and cotton picking technology, which is applied to pickers, manipulators, harvesters, etc., can solve the problems of low impurity content in manual picking and strict requirements on planting spacing of cotton plants, and achieve the effect of saving labor costs and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the purpose, technical solution, and advantages of the present invention more detailed, the present invention will be further described in detail below in combination with specific examples and with reference to the accompanying drawings.
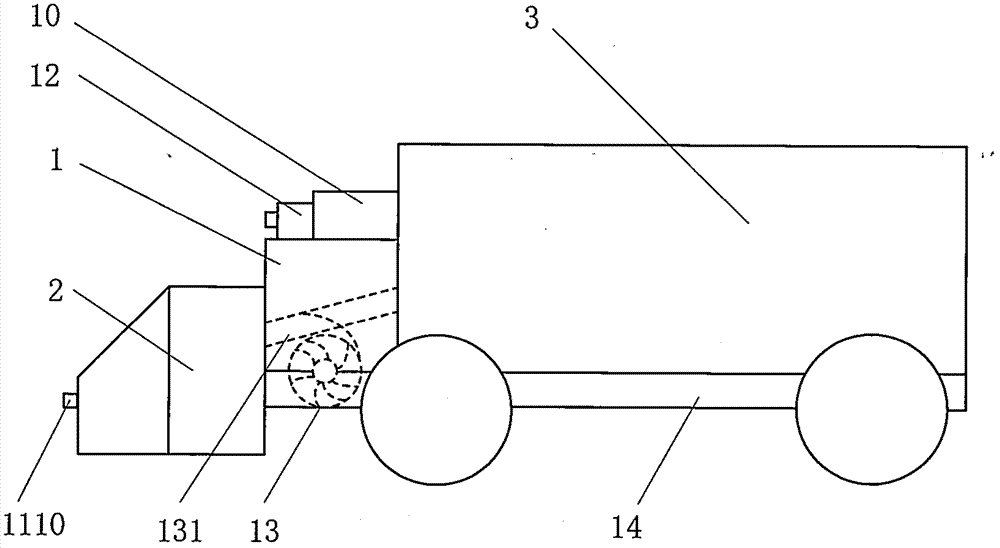
[0032] Such as figure 1 As shown, the cotton picking robot consists of an autonomous mobile platform 1, a visual cotton picking head 2, and a cotton collection bin 3.
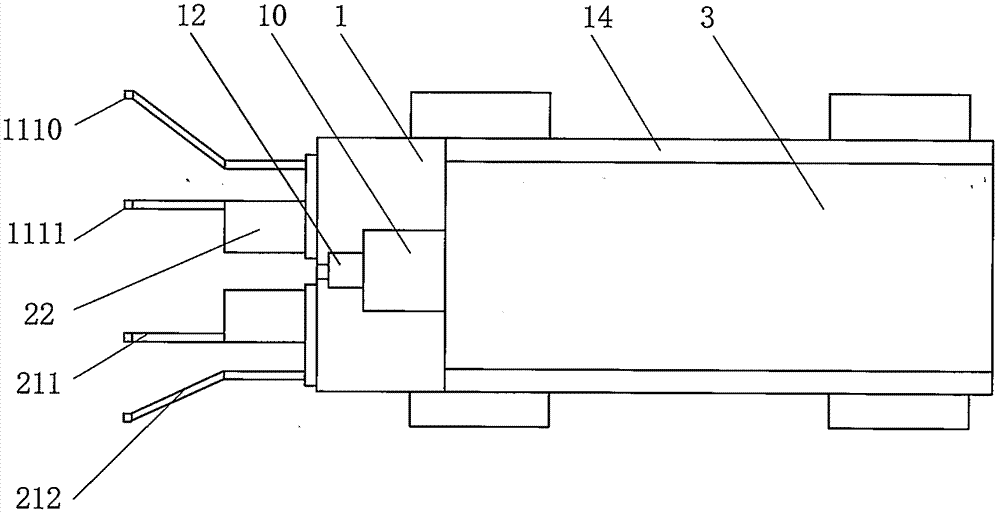
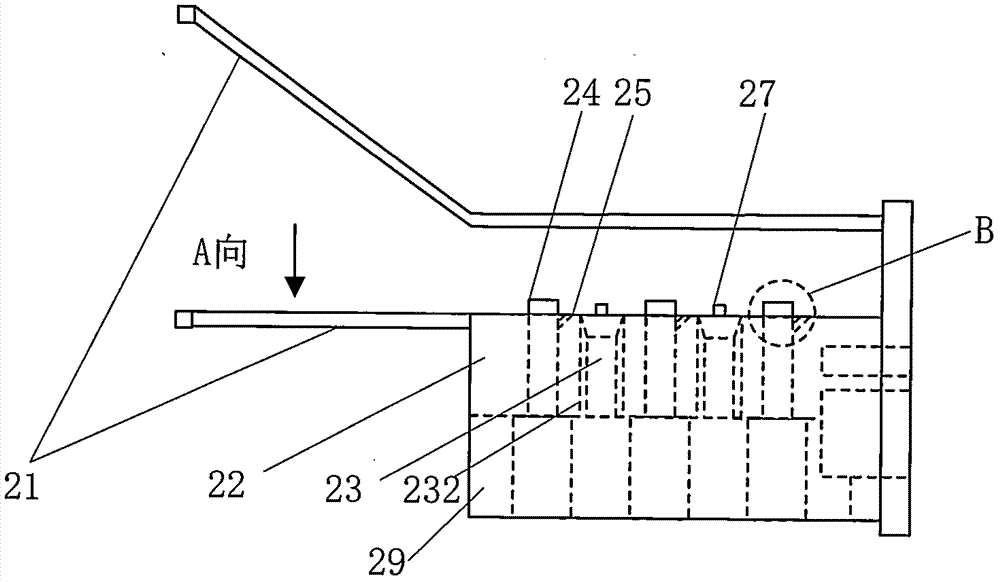
[0033] Such as figure 2 and Figure 8 As shown, the vehicle body of the autonomous mobile platform is equipped with a mobile platform control module 10, a GPS module 11, a forward camera 12 is installed on the roof, an ultrasonic sensor 111 is installed on the outside of the propeller 21, and an angular acceleration is installed on the vehicle body. Sensor 151 and acceleration sensor 152, weight sensor 17 is installed on the car beam that puts cotton collection bin 3, travel motor drive system 18 and travel motor 181 are installed in chassis 14 pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More