

Control method and system of collaborative robot
A control method and control system technology, applied in the field of collaborative robot control methods and systems, can solve the problems of difficult operation, large size, inconvenient use, and unsuitable application of the teaching pendant, and achieve simple and friendly user operation, high integration development efficiency, and development The effect of efficient process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, not to limit the present application.
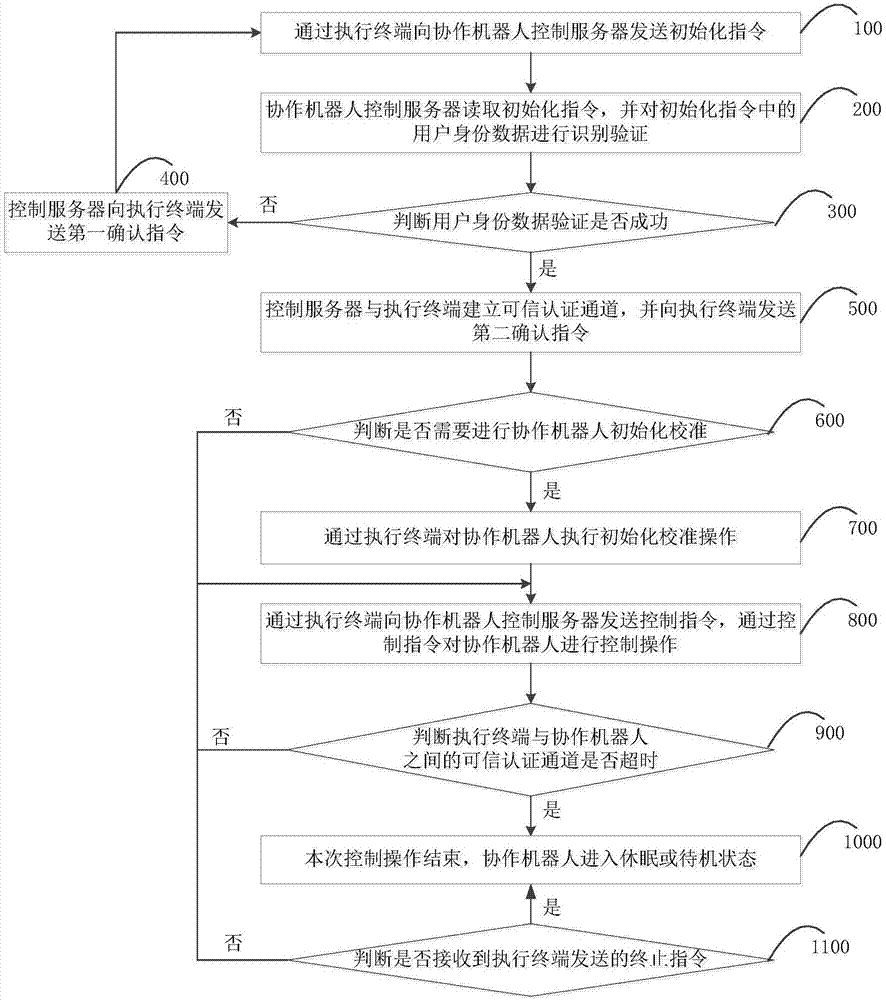
[0036] see figure 1 , is a flow chart of the collaborative robot control method according to the embodiment of the present application. The collaborative robot control method of the embodiment of the present application includes the following steps:
[0037] Step 100: Send the initialization instruction M to the collaborative robot control server through the execution terminal Init ;
[0038] In step 100, send the initialization command M Init Contains user identity data. The execution terminal includes a terminal device with a visual interface, a background application program of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More