Unmanned vehicle control system based on deep learning
An unmanned vehicle and deep learning technology, applied in the field of unmanned driving, can solve the problems of complex vehicle environment and control methods that fail to achieve expected results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
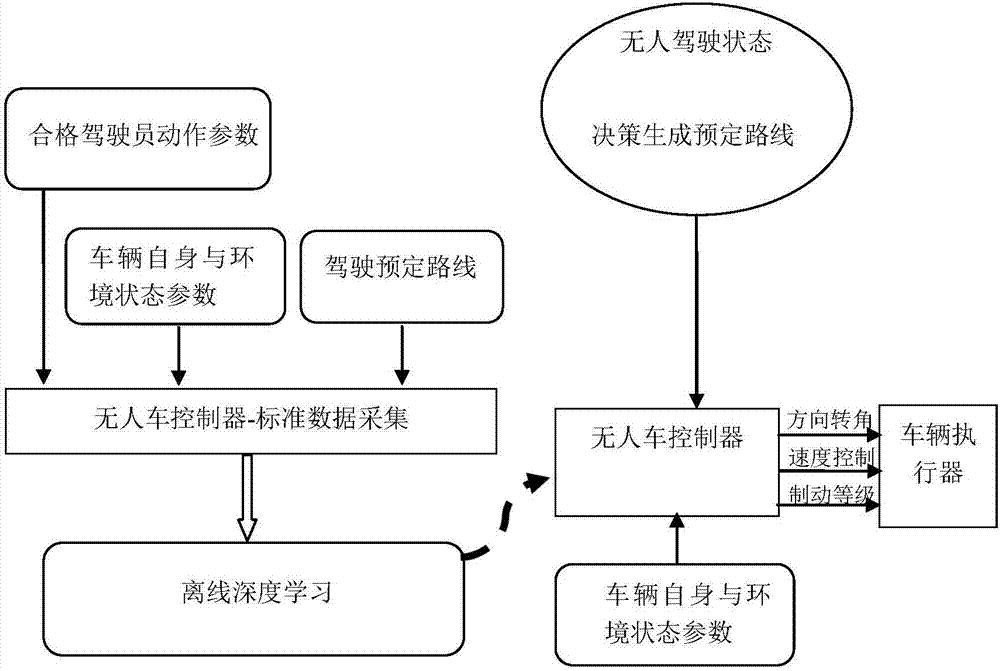
[0016] The embodiment of the present invention provides an unmanned vehicle control system based on deep learning, which controls the steering, braking and acceleration of the vehicle through the CAN bus vehicle network, and realizes the automatic patrol driving of the vehicle.
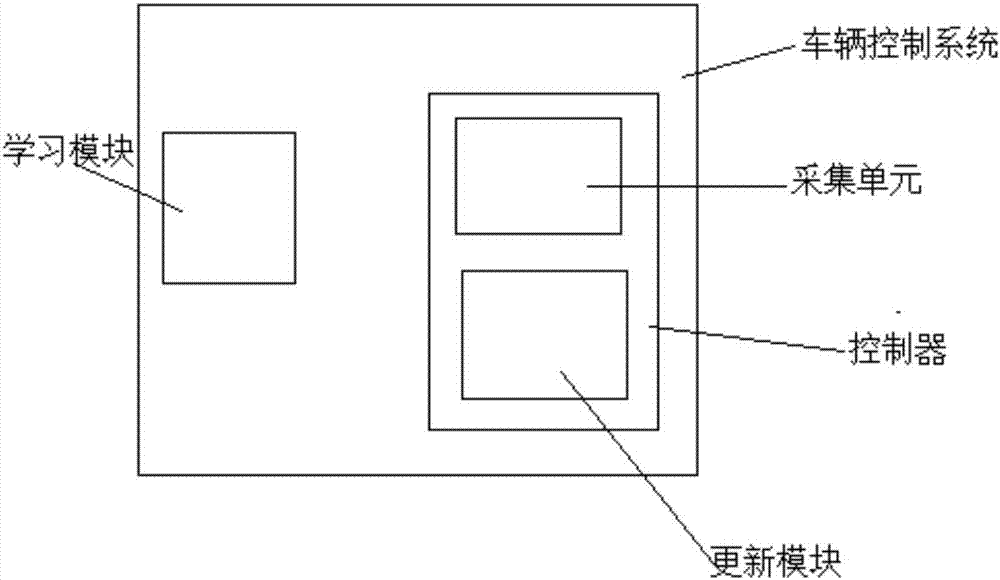
[0017] like figure 1 , 2 As shown, the vehicle control system includes: a controller, a learning unit, wherein,
[0018] The controller is used to complete the control of the unmanned vehicle, and can work in the manual driving mode and the automatic driving mode, with the embedded DSP chip conforming to the car specification level as the embedded processor core, coupled with SDRAM (synchronous dynamic random access memory), ADC (analog-to-digital conversion) interface, DAC (digital-to-analog conversion) interface, CAN (controller area network) interface, network interface, serial interface and digital IO interface.
[0019] The controller includes: an acquisition unit and an update unit, wherein, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More