

Road image segmentation method based on normal feature
An image segmentation and frame image technology, applied in the field of computer vision, can solve problems such as the inability to effectively segment road plane images, and achieve a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
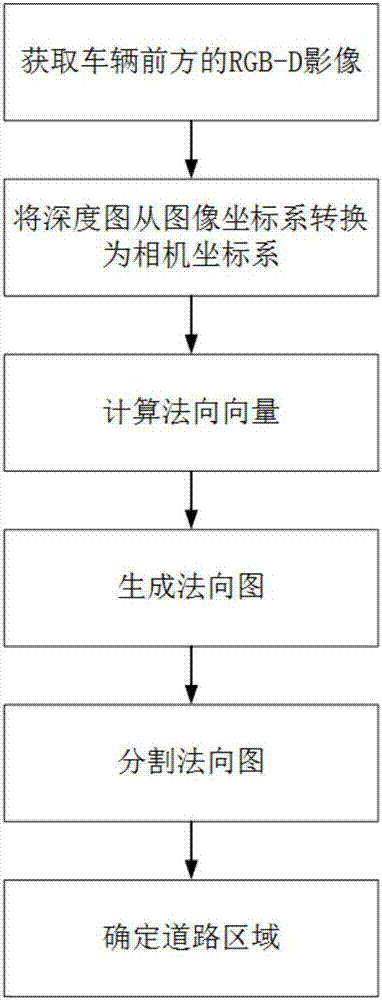
[0051] A road surface image segmentation method based on normal features, which is used to segment the image in the straight road plus shadow experimental environment, includes the following steps:
[0052]1) Obtain the RGB-D image through the camera, decompose the RGB-D image into frame images, and obtain the internal parameter K of the camera;
[0053]
[0054] Among them, d x and d y Respectively represent the number of length units occupied by a pixel point in the horizontal direction and vertical direction, u 0 and v 0 is the center of the plane where the frame image is located, and γ is the tilt parameter of the coordinate axis in the camera coordinate system with the camera optical center as the origin;
[0055] 2) The two-dimensional depth image I d The pixels in are converted from the image coordinate system to the camera coordinate system, where the conversion relationship is shown in formula (1):
[0056]
[0057] Among them, x and y are coordinates in th...
Embodiment 2
[0064] The road surface image segmentation method based on normal features as described in Embodiment 1, the difference is that the image in the experimental environment of the straight road plus shadow plus the left side and the vehicle in front is segmented; γ=0.
[0065] Such as Figure 5-8 As shown, the road surface image segmentation method based on normal features can clearly and accurately segment the safe driving area and the collision avoidance area for the images in the experimental environment of straight road plus shadow plus left and front cars.
Embodiment 3
[0067] The road surface image segmentation method based on normal features as described in embodiment 1, the difference is that the image under the experimental environment with cars on both sides is added to the straight road plus shadow; the camera in the step 1) is a vehicle-mounted dual camera. The same binocular camera can simultaneously acquire color images and two-dimensional depth images.
[0068] Such as Figure 9-12 As shown, the road surface image segmentation method based on normal features segmented the image in the experimental environment of straight road plus shadow and cars on both sides, and clearly and accurately segmented the safe driving area and the collision avoidance area.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More