

Sewing track error correction method and device based on 3D robot sewing
A robot and sewing technology, applied in the direction of sewing machine control devices, sewing equipment, sewing machine components, etc., can solve the problems of increased difficulty in placing curved surfaces in space, product scrapping, affecting speed and sewing position accuracy, etc., so as to avoid sewing inconsistencies or even scrapping Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
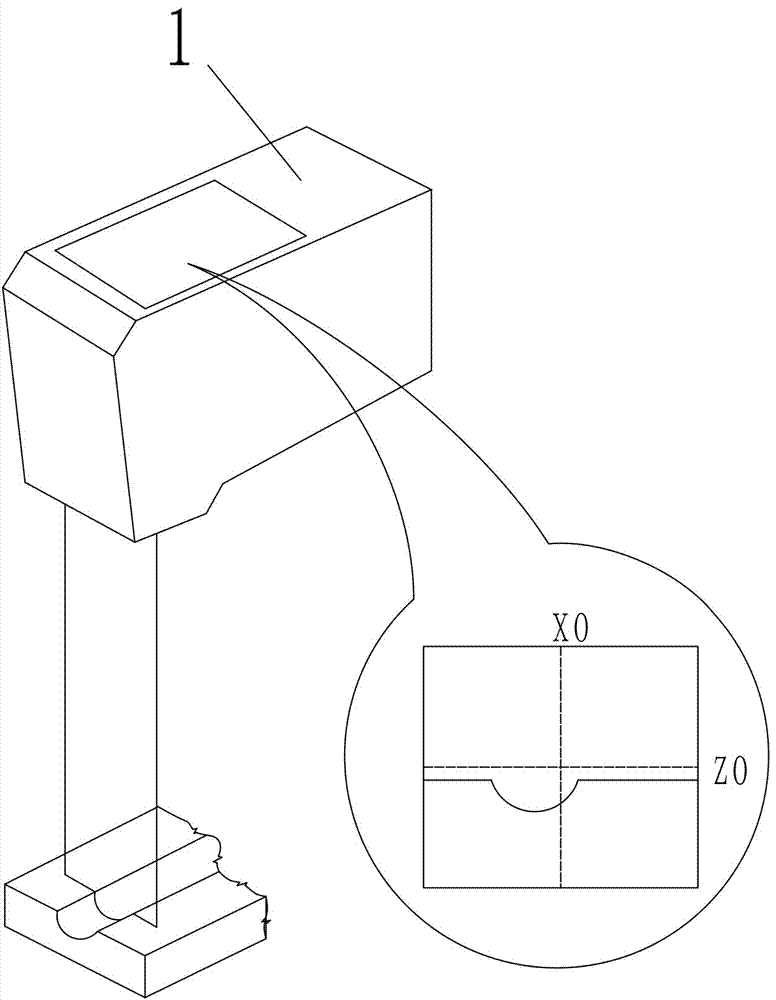
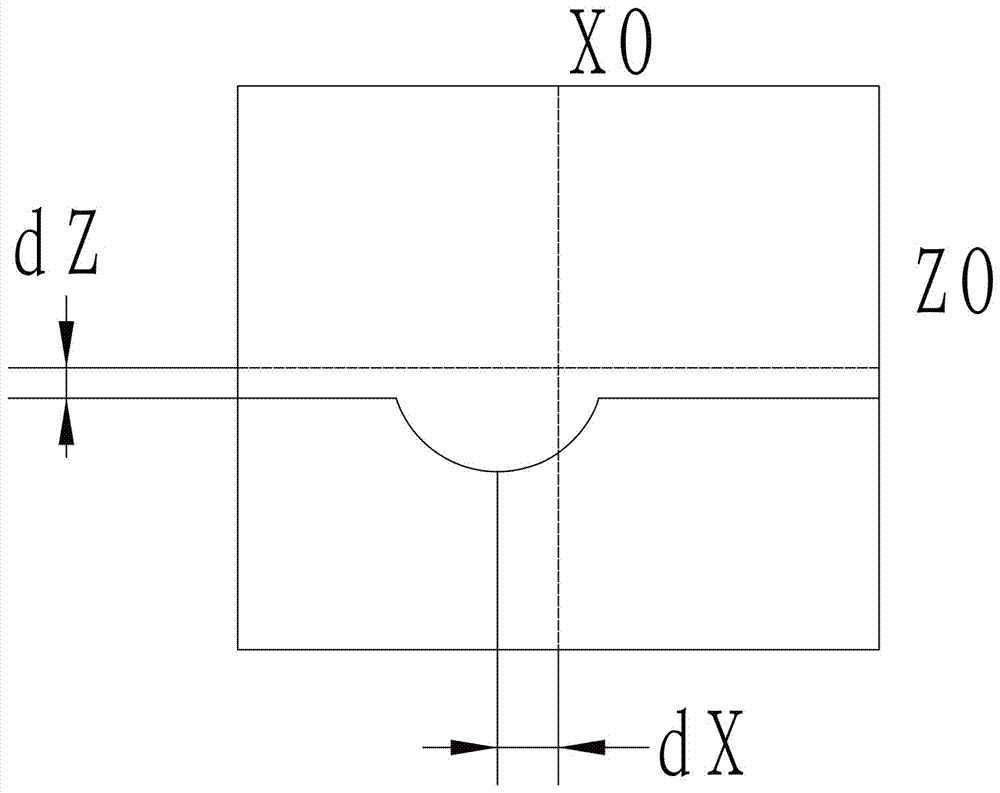
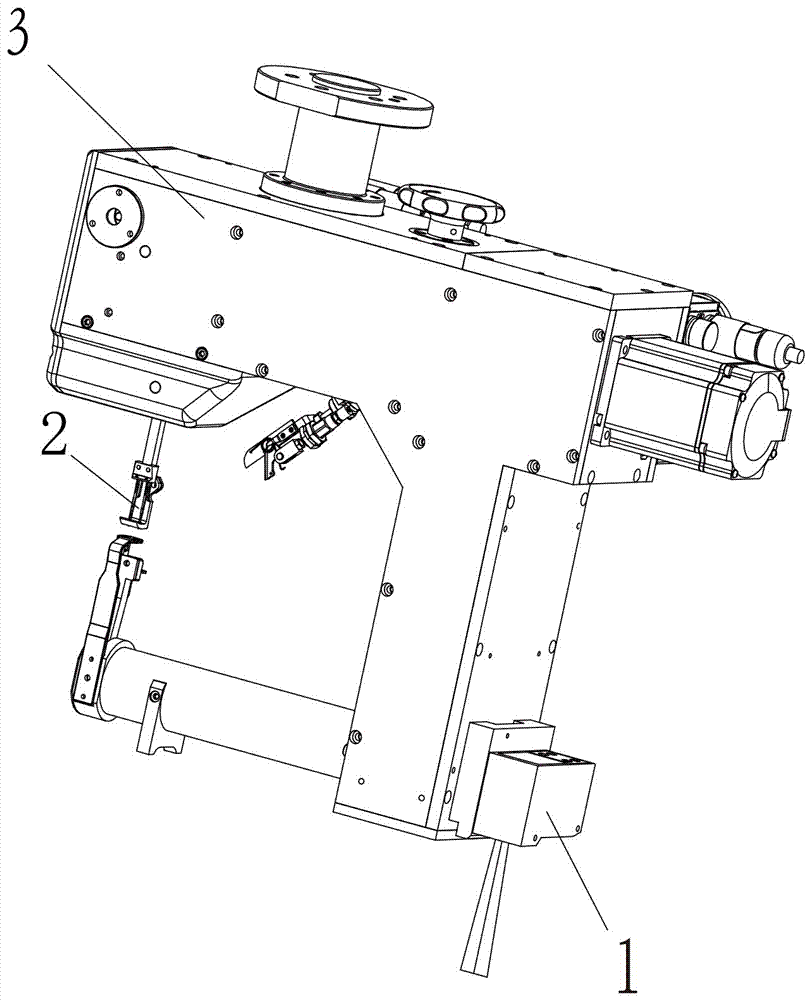
[0021] See attached picture. This embodiment includes a laser line scanner 1, a sewing machine head 3, a mechanical arm 4 and a workpiece 7 to be sewn; the laser line scanner 1 is installed on the sewing machine head 3; the sewing machine head is connected to the mechanical arm through a mounting flange 4 above; controlled by the mechanical arm 4, the whole moves to the set position to start scanning or sewing; the sewing machine head 3 calibrates the intersection point of the sewing machine needle 2 and the needle plate as the sewing tool coordinate system 5 (hereinafter referred to as sewing TCP); A laser line scanner 1 is installed on the sewing machine head 3, which can obtain the data information of the scanning section, and obtain the target tracking position information according to the section data information; the laser line scanner 1 generally uses 2D scanning, that is, depth and lateral offset information As well as the data that can be used for contour surface calc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More