

A state-limited control method and system for a quadrotor unmanned aerial vehicle
An unmanned aerial vehicle, state-limited technology, applied in the field of unmanned aerial vehicles, can solve problems such as errors, unproven closed-loop system stability, and complex system analysis.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0072] A state-limited control method for a quadrotor unmanned aerial vehicle, the method comprising:
[0073] Step 1) set up the dynamic equation of quadrotor unmanned aerial vehicle;
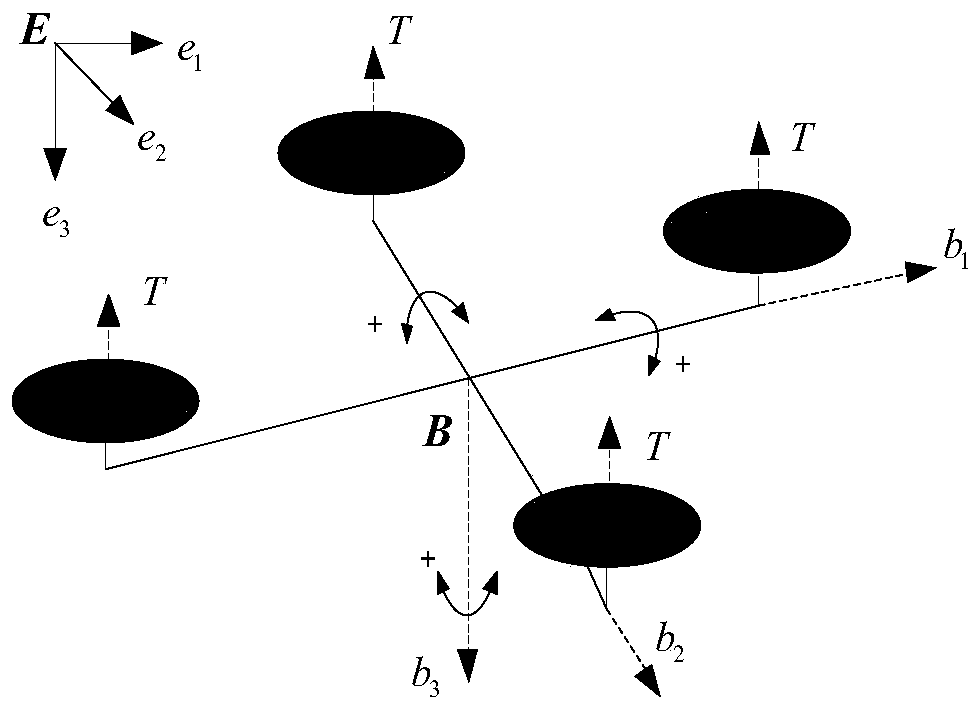
[0074] Such as figure 1 As shown, the coordinate system E={e 1 ,e 2 ,e 3} is the inertial reference system; the coordinate system B={b 1 ,b 2 ,b 3} is the body coordinate system, all of which satisfy the right-hand rule. In order to avoid Euler's singularity and improve calculation efficiency, the attitude of the aircraft is described using unit quaternion. Define a unit quaternion as which said is the unit quaternion vector part, called is the scalar part of the unit quaternion, each component of the unit quaternion satisfies q T q+η 2 =1. is the rotation matrix from the inertial coordinate system to the body coordinate system, defined as: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More