

Loading robot arm control multipoint mapping intelligent control method and system
A robot arm, intelligent control technology, applied in general control systems, control/regulation systems, manipulators, etc., can solve the problems of neural network retraining, impracticality, inconvenient maintenance of robots, etc., to avoid modeling and solving process, The effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0120] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
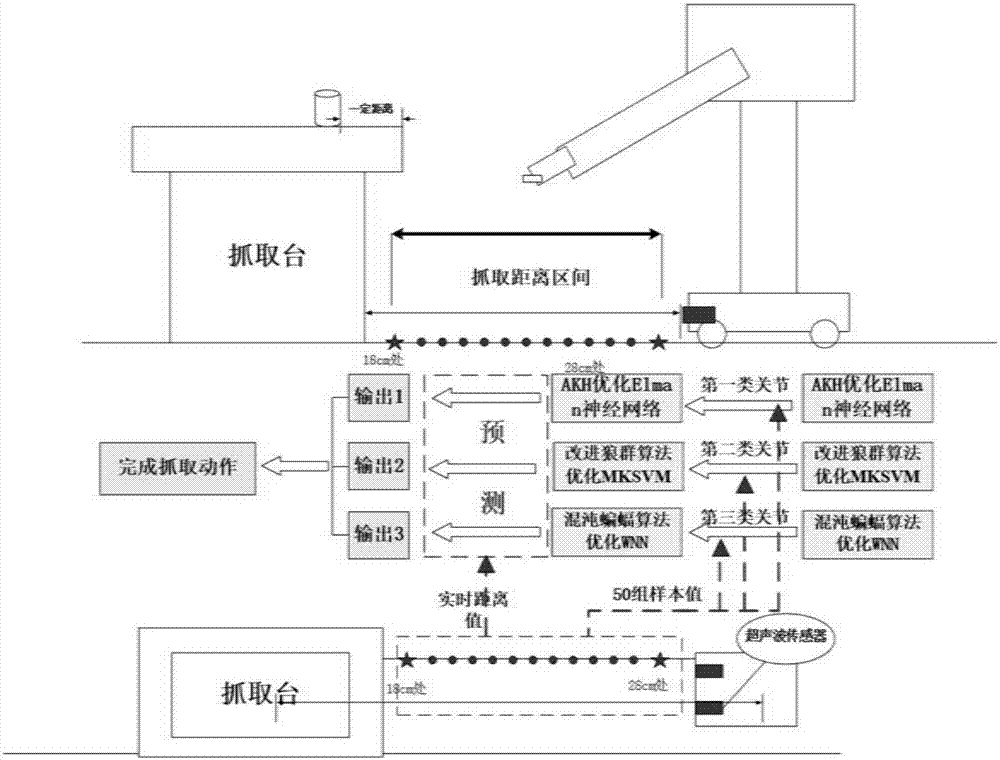
[0121] The schematic diagram of the grabbing process of the carrier robot is as follows: figure 1 Shown; the robot arm grasping control flow chart is shown in Figure 4 shown.
[0122] An intelligent control method for manipulating multi-point mapping of a carrier robot arm, comprising the following steps:
[0123] Step 1: When the carrier robot is at a fixed grabbing point within the specified grabbing distance interval, use the remote server to control the arm of the carrier robot to perform multiple grabbing training, and obtain 50 groups of carrier robots that complete the grabbing tasks at different fixed grabbing points. The sample set of grab samples;
[0124] Each grasping sample includes the distance between the fixed grasping point where the carrier robot base is located and the bottom edge of the grasping table and the control value matrix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More