

Method for simulating laser radar data based on multi-depth-camera splicing
A technology of depth camera and lidar, applied in the field of simulation, can solve problems such as narrow beam, high cost, and difficulty in space search targets, and achieve the effect of small data error and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
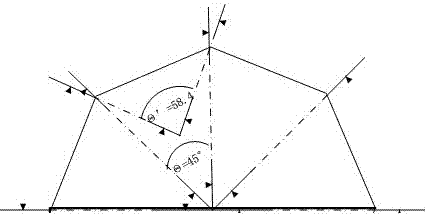
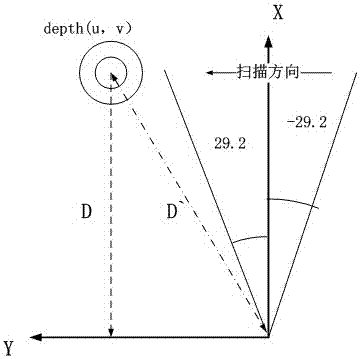
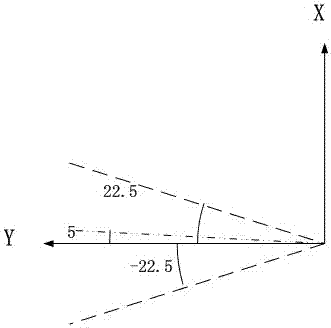
[0014] see Figure 1~4 , in an embodiment of the present invention, a method of splicing simulated lidar data based on multiple depth cameras, by combining and splicing multiple depth cameras according to specific positions, to detect obstacles greater than 90 degrees and less than 6 meters in front of the robot, Implements the operation of a simulated lidar.
[0015] Such as figure 1 Shown is the mosaic method of multiple depth cameras. Eight depth cameras ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More