Path planning method for cleaning robot
A cleaning robot and path planning technology, applied in the direction of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve the inability to distinguish between dynamic obstacles and static obstacles, the impact of cleaning robot path planning, and the impact of cleaning robot working path formulation and other issues to achieve the effect of making up for easy misjudgments and improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution provided by the present invention will be described in more detail below by means of the accompanying drawings and specific embodiments:
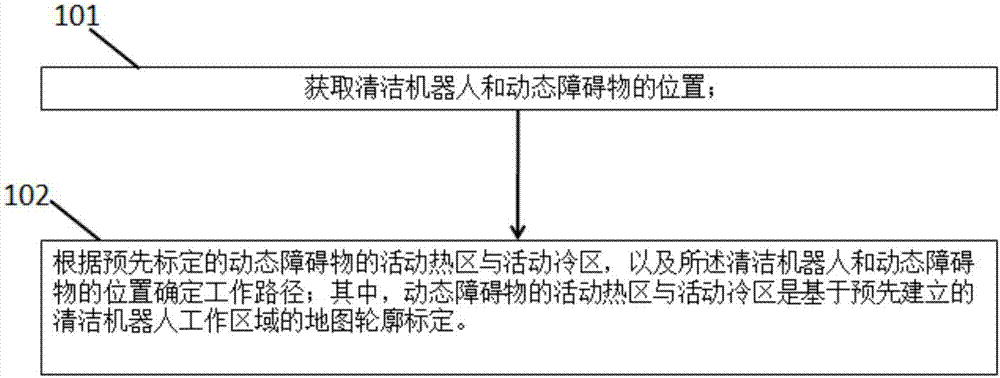
[0025] attached figure 1 Specific examples of the methods of the present invention are disclosed. like figure 1 Shown is a block diagram of the steps of the method of the present invention, disclosed in this embodiment:
[0026] A path planning method for a cleaning robot, comprising:
[0027] Step 101, obtaining the positions of the cleaning robot and the dynamic obstacle;
[0028] Step 102, determine the working path according to the pre-calibrated active hot area and active cold area of the dynamic obstacle, and the positions of the cleaning robot and the dynamic obstacle; wherein, the active hot area and active cold area of the dynamic obstacle are based on the preset The established map contour calibration of the cleaning robot's working area.
[0029] In this embodiment, the cleaning robot can ju...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More