

ROS (Robot Operating System) based robot automatic following method
An operating system and automatic following technology, applied in two-dimensional position/channel control and other directions, can solve the problems of low pedestrian recognition accuracy and insufficient lidar features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with specific embodiments.
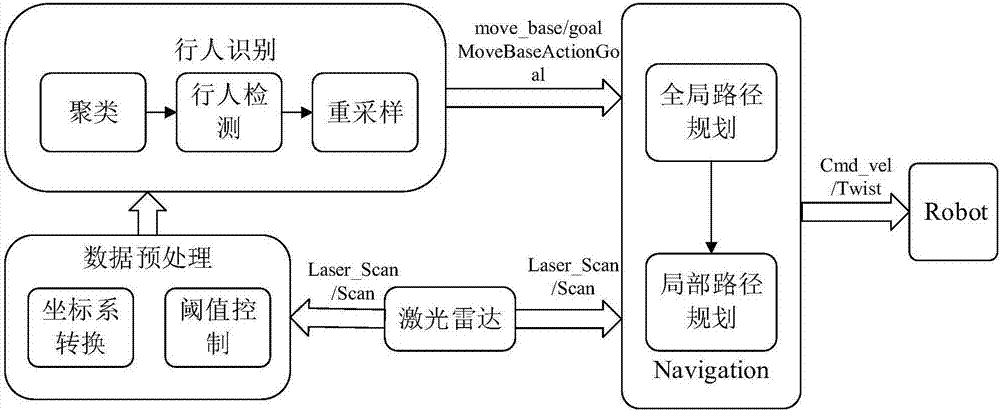
[0066] The robot automatic following method based on the ROS robot operating system provided by this embodiment comprises the following steps:
[0067] 1) Sensor data processing: use lidar to collect data, preprocess the data, remove those data that exceed the preset range, and limit the data to the range of [min_size, max_size]:
[0068] min_size≤data_useful≤max_size
[0069] Among them, min_size and max_size represent the minimum and maximum lidar data respectively, and data_useful represents valid data;
[0070] Use the tf framework of ROS to convert the collected data from the coordinate system tf / laser to the global coordinate system tf / base_link, scan represents the data type in the lidar coordinate system tf / laser, and detect_data represents the global coordinate system tf / base_link The data type of:
[0071]
[0072] 2) Data clustering: use hierarchical cluste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More