

Lower limb rehabilitation robot gait planning method based on lower limb walking characteristics
A rehabilitation robot and gait planning technology, which is applied in the field of robotics and can solve problems such as the ineffectiveness of mathematical models, the fragmentation of biological properties, and the inability to reveal the laws of walking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
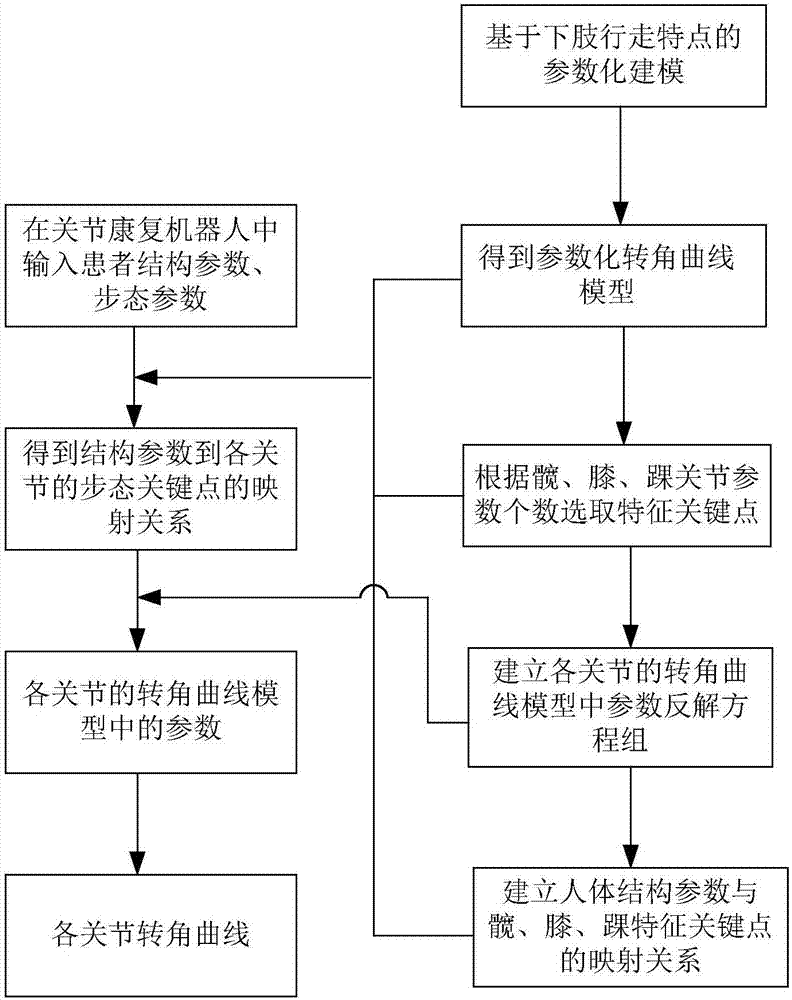
[0025] The invention provides a motion planning method for a lower limb rehabilitation robot based on the walking characteristics of the lower limbs. Through the parametric description of the movement of the lower limbs of the human body, a parameterized human lower limb movement model is established, and the generation of the lower limb movement trajectory is realized according to different structural parameters of the patient, including Parametric joint angle curve modeling based on the walking characteristics of the lower limbs, reverse solution of the parameters of the angle curve model, establishment of the mapping relationship between human body structure parameters and feature key points, and the generation of motion trajectories are four steps, specifically:
[0026] Step 1: Parametric modeling based on the walking characteristics of the lower ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More