

A Method for Estimating Vehicle Pedestrian Areas Based on Optical Flow Clustering
A clustering and optical flow technology, applied in the research fields of intelligent transportation and intelligent vehicles, can solve the problems such as the inability to reduce the computational complexity of optical flow field segmentation, the lack of consideration of the difference between motion scenes and pedestrian movements, and the increase of pedestrian detection running time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in detail:
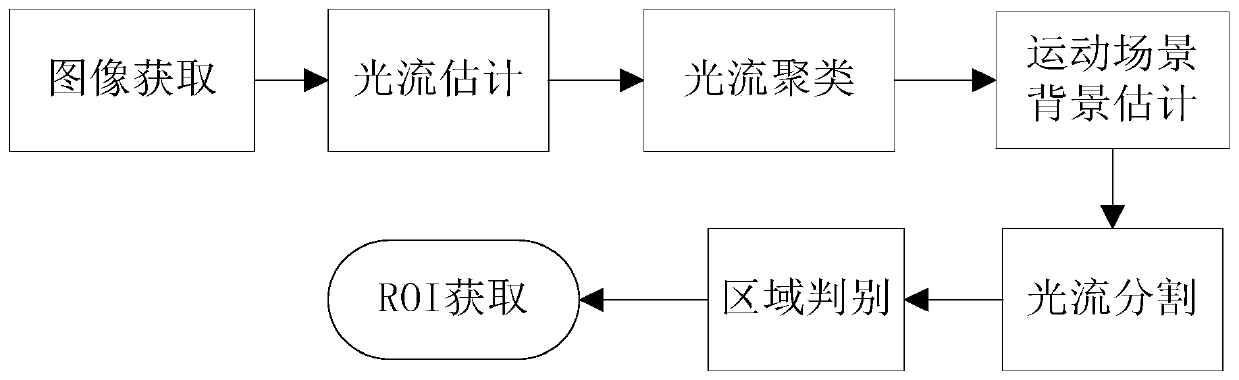
[0058] Such as figure 1 The framework of the method described in the present invention is shown. The method of the present invention is to estimate the optical flow of the image acquired by the camera to obtain the optical flow field of the image; then perform optical flow clustering to estimate the background area; remove the background area, The foreground area is segmented using the graph segmentation algorithm; finally, each area of the foreground area is discriminated, and the effective pedestrian area is identified. Specific steps are as follows:
[0059] Step 1. Use the on-board camera to shoot the road ahead of the vehicle. The image acquired by the camera is an RGB three-dimensional image. After image grayscale processing, a two-dimensional grayscale image is obtained. The two-dimensional grayscale image can be regarded as the brightness value ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More