

A palm tracking method and system based on depth images
A depth image and palm technology, applied in the field of image processing, can solve problems such as unrecoverable, target tracking failure, unstable growth point, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The scope of applicability of the present invention will become apparent from the detailed description given below. It should be understood, however, that the detailed description and specific examples, while indicating the preferred embodiment of the invention, are given for purposes of illustration only.
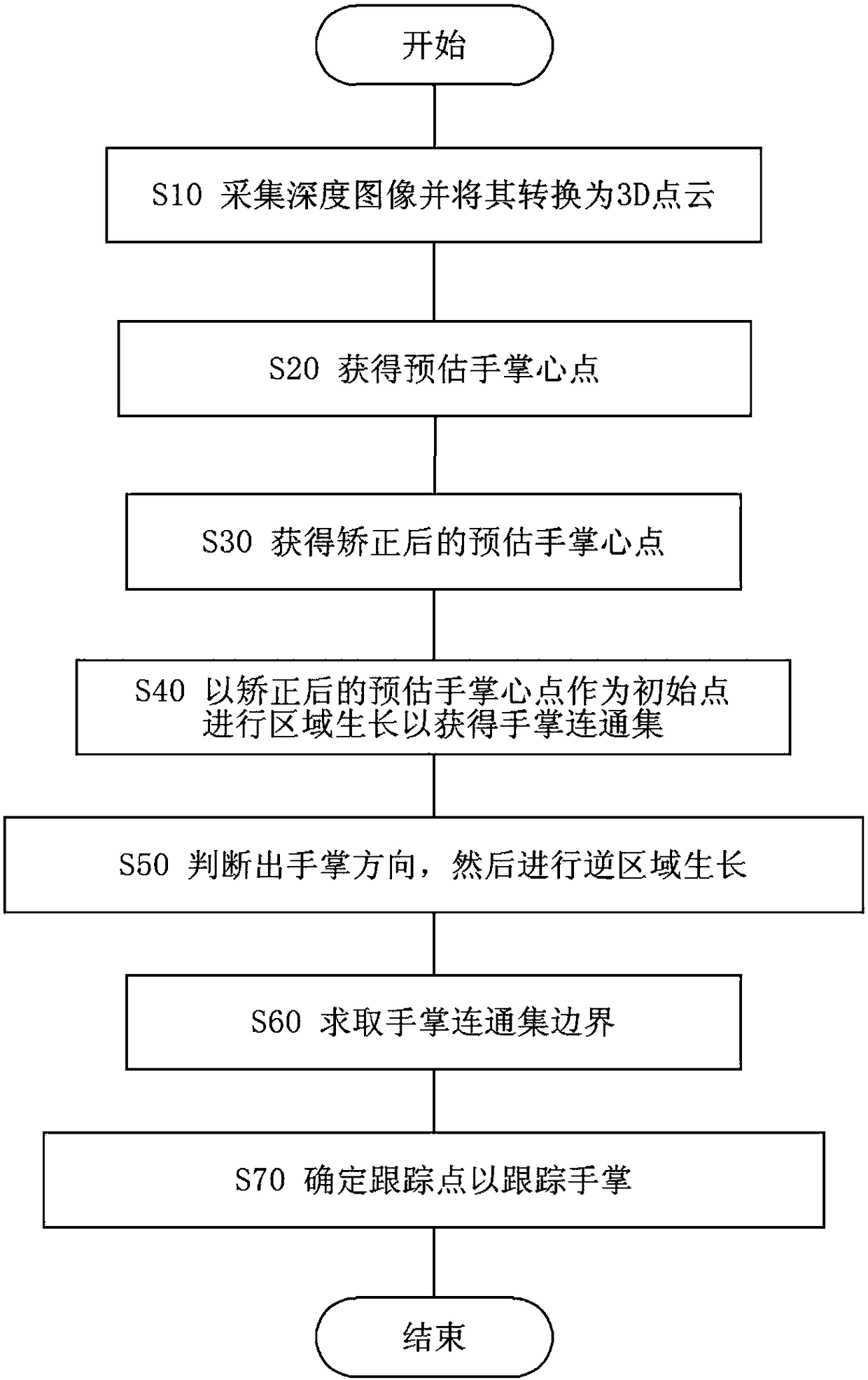
[0026] figure 1 An embodiment of the method of the invention is shown for tracking a palm based on a depth image. The method of this embodiment starts at step S10, collecting a plurality of depth images containing gestures and converting them into 3D point clouds based on camera parameters, and obtaining the palm position of the last frame according to static or dynamic detection. Afterwards, the process proceeds to step S20, where the approximate position of the palm in the current frame is estimated according to factors such as the tracking position and velocity of the previous frame to obtain an estimated palm point. Specifically, according to the palm position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More