

Grabbing mechanical arm for lead-acid storage batteries
A technology of lead-acid batteries and grasping manipulators, applied in the field of manipulators, can solve the problems of unsafe manual handling, battery falling off, inconsistent clamping force, etc., and achieve the effect of stable blocking, avoiding falling off, and consistent clamping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
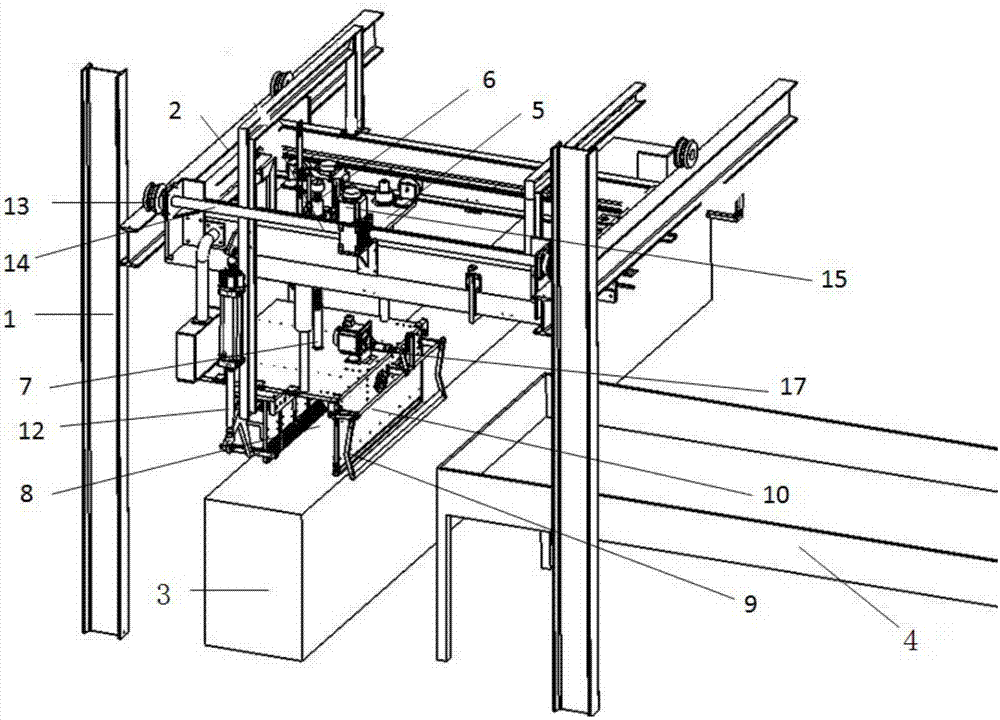
[0029] The manipulator that controls the battery placement distance includes a frame 1 and a three-way motion mechanism arranged on the frame. The three-way motion mechanism of the clamp includes a clamp X-axis motion mechanism, a clamp Y-axis motion mechanism, and a clamp Z-axis motion mechanism.
[0030] The X-axis motion mechanism of the fixture is two pairs of walking rollers 13 arranged on the frame beam 2, each pair of walking rollers 13 is connected by a shaft, and a walking motor 15 is arranged on the shaft;
[0031] The Y-axis motion mechanism of the clamp includes a mounting plate 5 arranged on the frame 1, a clamp translation motor 11 arranged under the mounting plate 5, and a rack arranged at the bottom of the mounting plate 5 to engage with the clamp translation phase 11;
[0032] The Z-axis motion mechanism of the clamp is arranged on the upper and lower motors 6 of the clamp on the mounting plate 5, one end is connected with the upper and lower motors 6 of the cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More