

Unmanned aerial vehicle-based intelligent artificial limb replacing method and system
A technology of drones and prosthetics, applied in the field of prosthetics, can solve problems such as replacement of prosthetics, endangering the safety of users, and achieve the effect of preventing falling off
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
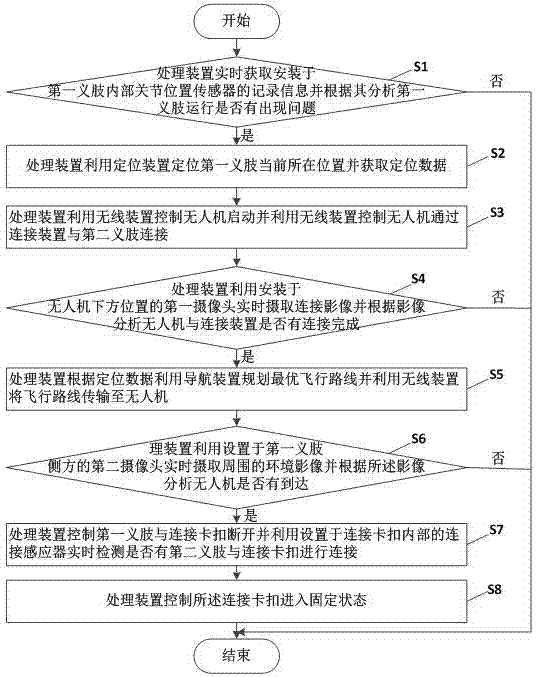
[0075] refer to figure 1 , figure 1 A flow chart of the UAV-based intelligent prosthetic replacement method provided by one of the examples of the present invention.
[0076] Specifically, this embodiment provides a method for replacing an intelligent artificial limb based on a drone, the method comprising the following steps:
[0077] S1. After the first prosthetic 1 is installed on the body part of the user, the processing device 11 acquires the recorded information installed on the internal joint position sensor 7 of the first prosthetic 1 in real time and analyzes whether the first prosthetic 1 is running according to the recorded information there is a problem;
[0078] S2. If there is, the processing device 11 uses the positioning device 112 to locate the current position of the first prosthetic 1 and obtain positioning data;
[0079] S3. The processing device 11 uses the wireless device 114 to control the drone 2 to start and uses the wireless device 114 to control t...
Embodiment 2
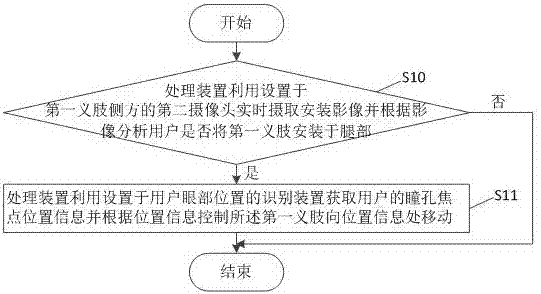
[0095] refer to figure 2 , figure 2 A flow chart of a method for recognizing and moving a prosthetic limb provided as an example of the present invention.
[0096] Specifically, this embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, when the first prosthesis 1 is installed on the body part of the user, the method further includes the following steps:
[0097] S10, the processing device 11 uses the second camera 5 arranged on the side of the first prosthesis 1 to capture the installation image in real time and analyze whether the user has installed the first prosthesis 1 on the leg according to the image;
[0098] S11. If so, the processing device 11 uses the identification device 10 installed at the position of the user's eyes to acquire the position information of the user's pupil focus in real time and controls the first prosthesis 1 to the position information according to the position information. move around.
[0099] Specif...
Embodiment 3
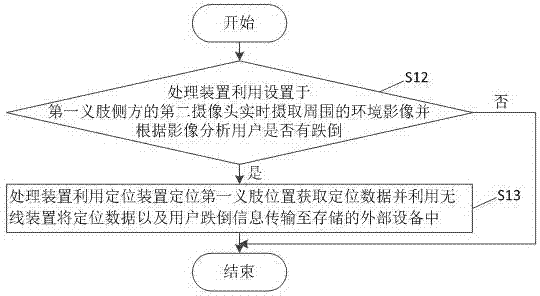
[0101] refer to image 3 , image 3 A flowchart of a fall detection method provided for one example of the present invention.
[0102] Specifically, this embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, after the first prosthesis 1 is installed on the body part of the user, the method further includes the following steps:
[0103] S12. The processing device 11 uses the second camera 5 arranged on the side of the first prosthesis 1 to capture the surrounding environment image in real time and analyze whether the user has fallen or not according to the image;
[0104] S13. If yes, the processing device 11 uses the positioning device 112 to locate the current position of the first prosthesis 1 to obtain positioning data, and uses the wireless device 114 to transmit the positioning data and the user's fall information to a stored external device.
[0105] Specifically, after the user installs the first prosthesis 1 on the body part whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More