

Intelligent robot route planning method
An intelligent robot and path planning technology, applied in the direction of instruments, manipulators, motor vehicles, etc., can solve the problems of no positioning, no environmental map, and no path planning, etc., to achieve the effect of avoiding collisions and small errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
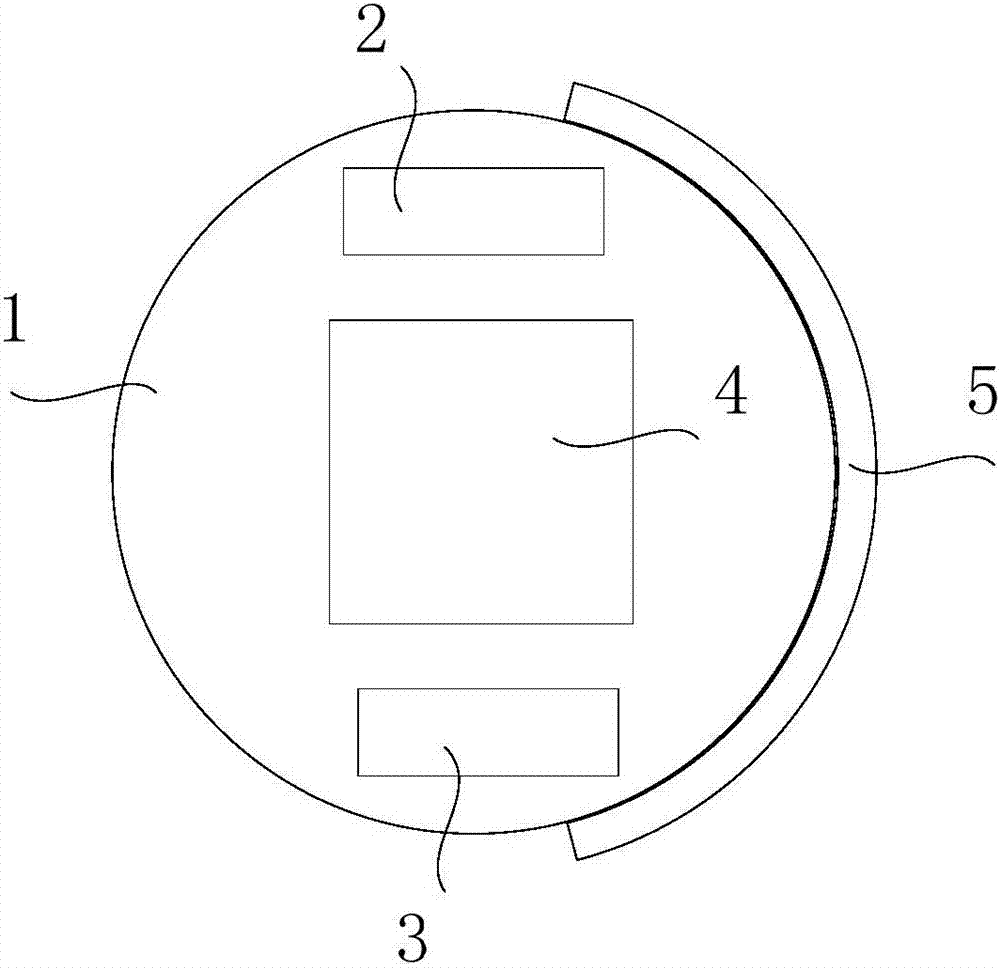
[0039] Such as figure 1As shown, the path planning method for an intelligent robot provided in this embodiment is based on an intelligent robot including a mobile body 1, a main control module 4, a sensor set 5, a power supply module and an area operation component. Wherein, the action body 1 includes a casing and action wheels 2,3. The sensor set 5 includes a collision detection sensor, an anti-fall detection sensor, an obstacle detection sensor, a distance information sensor, and an angle information sensor, all of which are electrically connected to the main control module.
[0040] Specifically, the collision detection sensor is used when the intelligent robot encounters an obstacle in front of it, makes a judgment that it has collided with the obstacle and notifies the main control module 4 . The anti-fall detection sensor is used to make a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More