

A UAV remote real-time positioning surveying and mapping display interconnected control method
A real-time positioning and control method technology, applied in the field of UAV surveying and mapping, can solve the problems of time axis labeling, poor real-time performance, and inability to associate positions, etc., to improve human-computer interaction, improve surveying and mapping efficiency, and improve information exchange and operation The effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below. In the following description, numerous specific details are set forth in order to provide a thorough understanding of the present invention. However, the present invention can be implemented in many other ways different from those described here, and those skilled in the art can make similar improvements without departing from the connotation of the present invention, so the present invention is not limited by the specific implementation disclosed below.
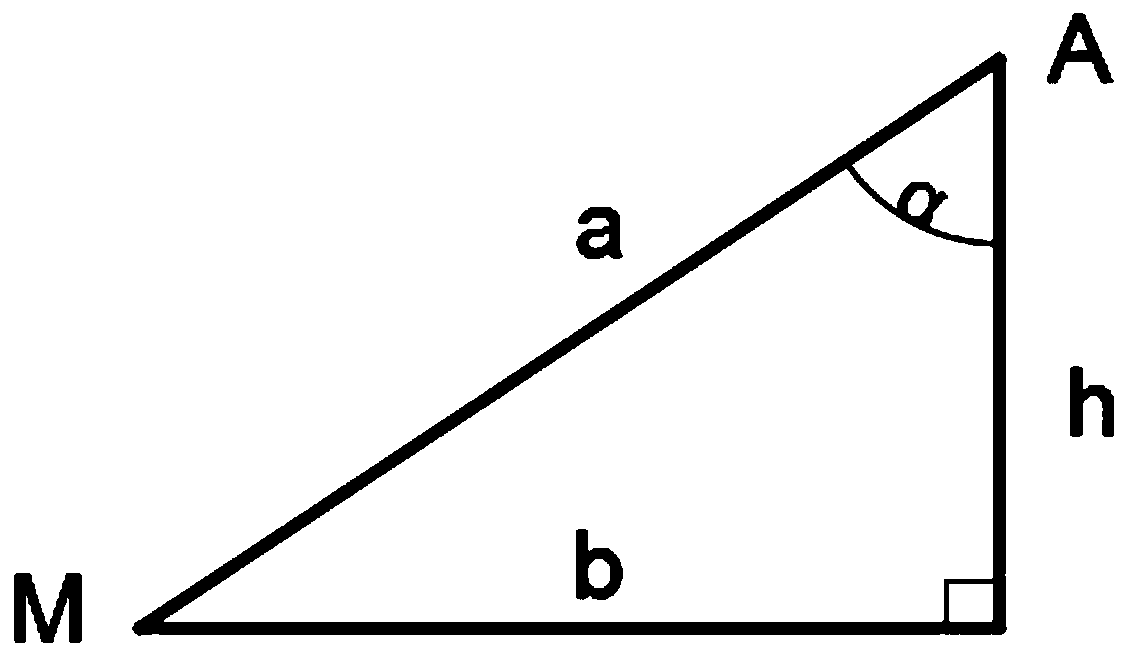
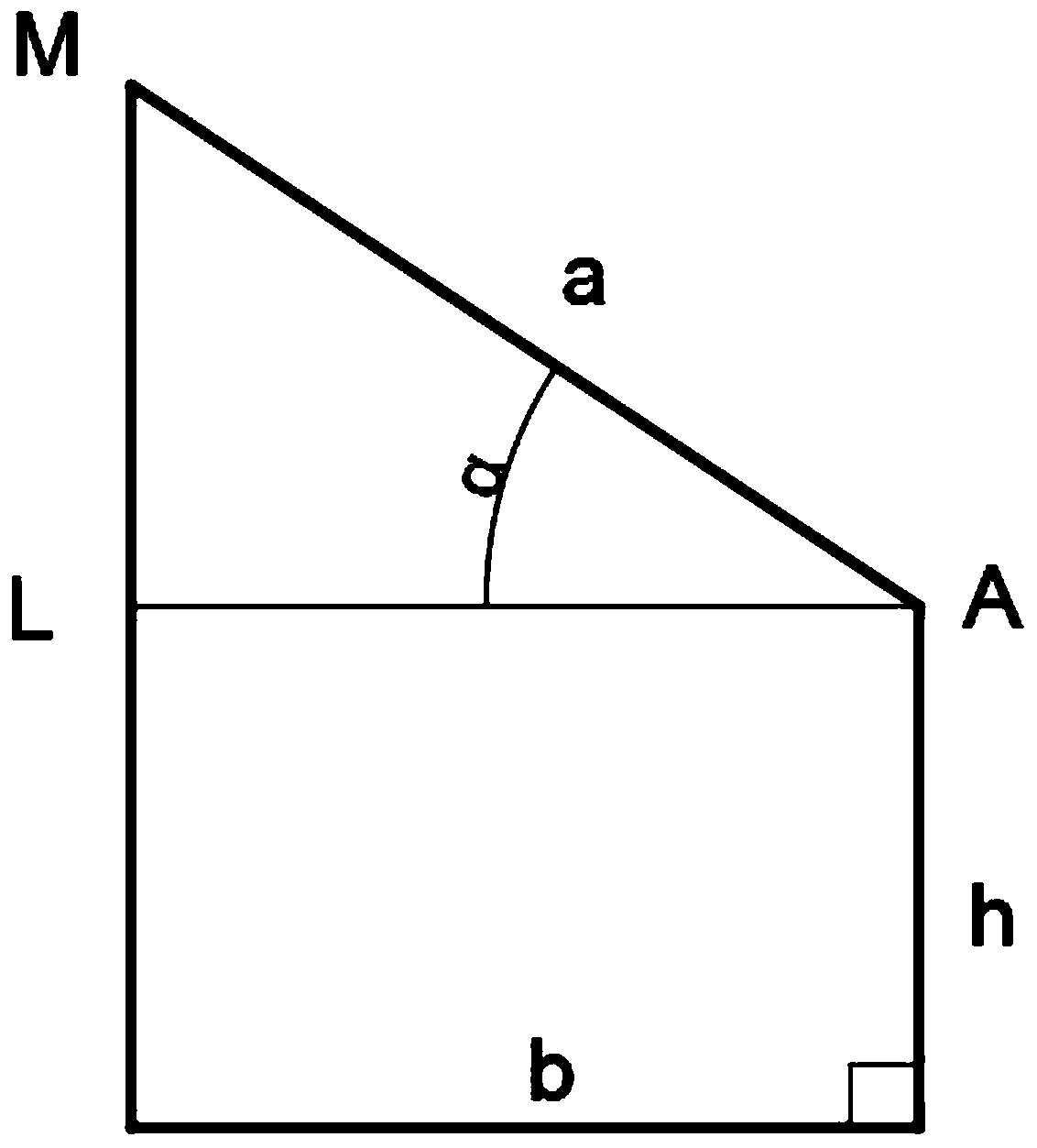
[0052] Step 1. Determine the geographic coordinates of the center point of the drone camera:
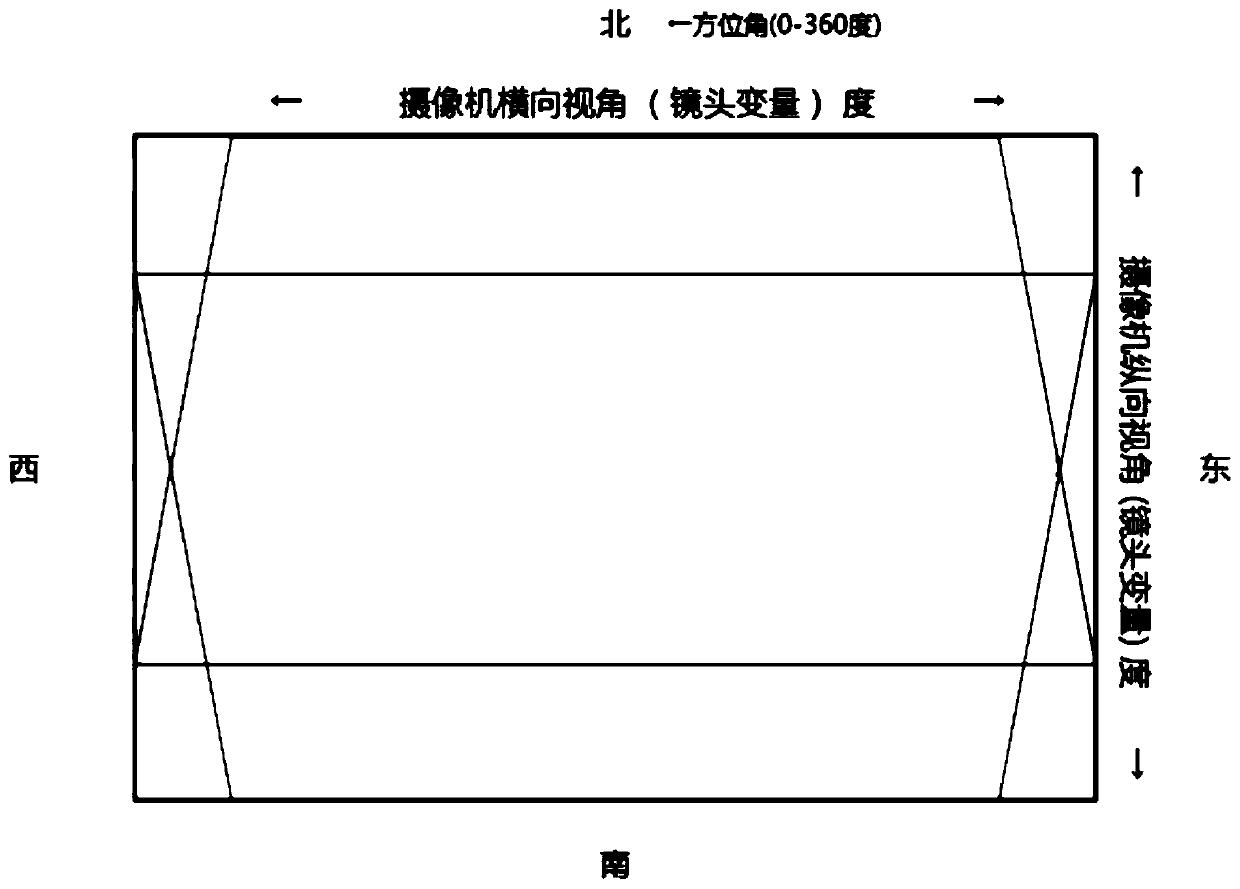
[0053] 1) Determine the basic parameters: determine the latitude and longitude (lng, lat) and altitude h of the location of the drone, and determine the azimuth β and pitch angle α of the camera;
[0054] 2) Determine the altitude of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More