

Robot path planning method based on chaotic backward flower pollination algorithm
A technology of path planning and robotics, applied in the direction of instruments, computing, motor vehicles, etc., can solve the problem of low efficiency of path planning, and achieve the effect of enhancing global search capabilities, improving quality, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
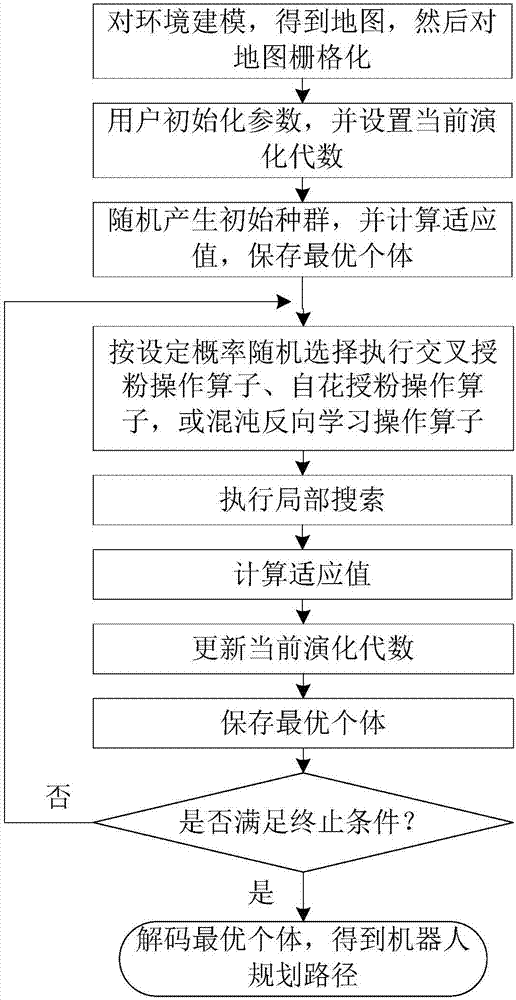
[0056] Step 1, modeling the environment of the robot path planning area, obtaining a map of the path planning area, and then rasterizing the map;
[0057] Step 2, the user initializes parameters, and the initialization parameters include the number of key nodes of the path D=8, the population size NP=30, the hybridization rate Pcr=0.3, the mutation rate Pmu=0.2, and the scaling factor F=0.5;
[0058] Step 3, input the start point coordinates and end point coordinates of robot path planning;
[0059] Step 4, randomly generate three real numbers ra, rb and rc in the interval [0,1];
[0060] Step 5, make the Lorenz chaotic mapping variable LA=ra, LB=rb and LC=rc;
[0061] Step 6, let the current evolution algebra t=0;
[0062] Step 7, randomly generate the initial population in, is the population P t The i-th individual in , which stores the abscissa and ordinate of the 8 key nodes of the path, express The jth dimension of , the individual subscript i=1,2,...,NP, the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More