

Gravity compensation method for mechanical arm load mass and sensor null drift online recognition
A technology of gravity compensation and sensors, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inaccurate sensor values and influence control effects, and achieve a wide range of applications and complete functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions in the embodiments of the present invention will be clearly and completely described and discussed below in conjunction with the accompanying drawings of the present invention. Obviously, what is described here is only a part of the examples of the present invention, not all examples. Based on the present invention All other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0026] In order to facilitate the understanding of the embodiments of the present invention, specific embodiments will be taken as examples for further explanation below in conjunction with the accompanying drawings, and each embodiment does not constitute a limitation to the embodiments of the present invention.
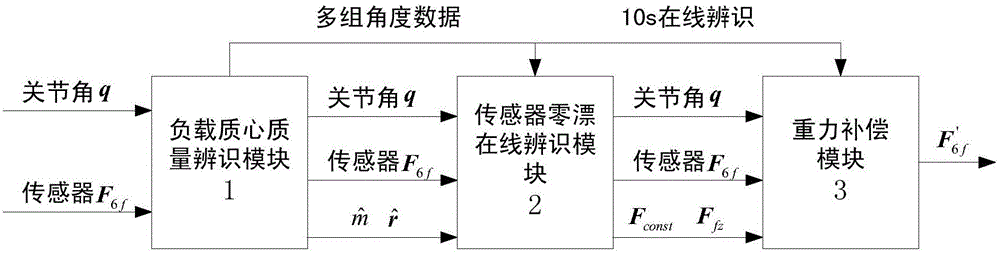
[0027] This embodiment provides a gravity compensation method for online identification of the load mass of the manipulator and the zero drift of the sensor, including th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More