

Intelligent carrying robot optimal path hybrid graph theory control planning method
A technology of optimal path and local optimal path, applied in the direction of vehicle position/route/height control, non-electric variable control, control/regulation system, etc., can solve the problem of large search range, difficulty in path search by robots, and many path points and other problems to achieve the effect of speeding up the search, realizing real-time optimal path search, and saving search time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
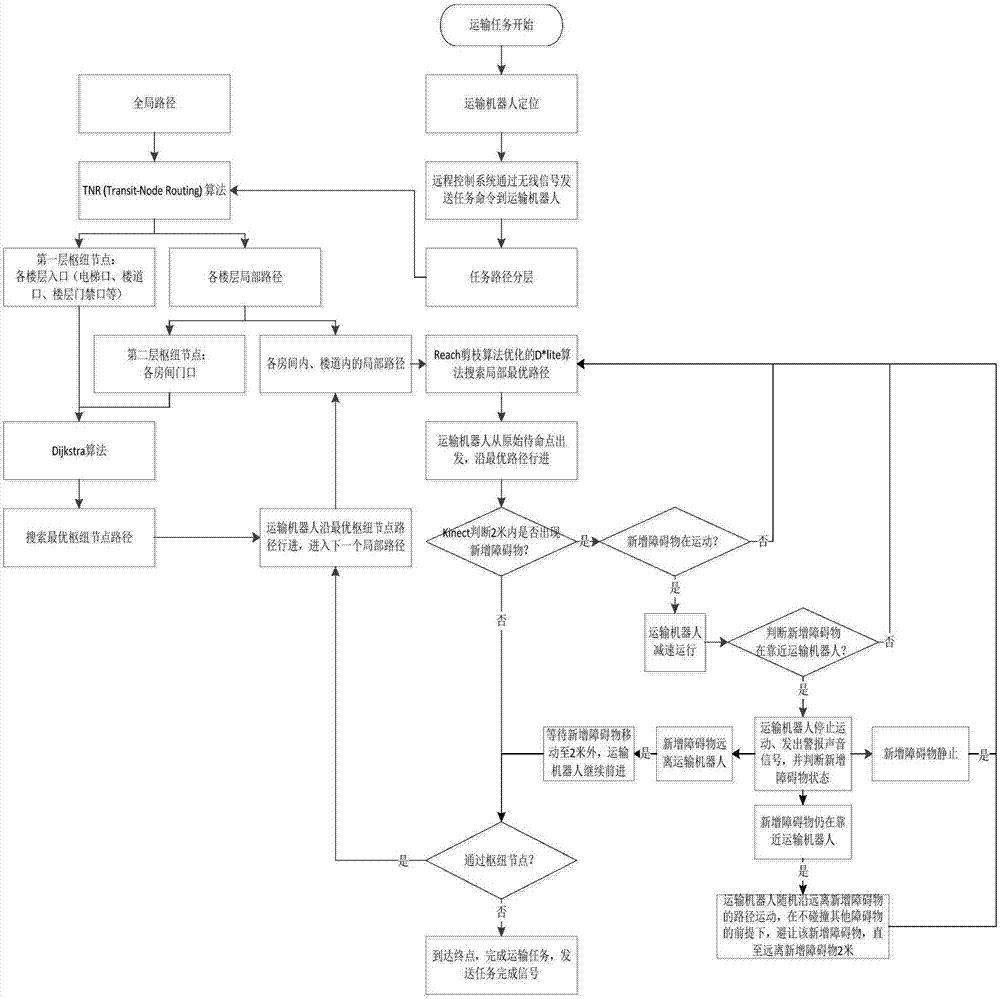
[0056] Such as figure 1 As shown, a hybrid graph theory control planning method for an optimal path of an intelligent carrier robot includes the following steps:
[0057] Step 1: Construct a three-dimensional coordinate system of the global map for the carrying area of the carrier robot, and obtain the coordinates of the walkable area under the three-dimensional coordinate system of the global map;
[0058] The ground center point of the carrying area is the origin, the due east direction is the X axis, the true north direction is the Y axis, and the vertical ground direction is the Z axis;
[0059] The carrying area of the carrying robot is all the floor connecting areas in a building, and the walkable area refers to the area where obstacles in the building are deleted from all the floor connecting areas;
[0060] In the three-dimensional coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More