

Parking system path planning method on the basis of improved ant colony algorithm
An ant colony algorithm and path planning technology, applied in control/adjustment system, vehicle position/route/height control, motor vehicles, etc., can solve problems such as lack of perfect locking and monitoring systems, trouble picking up cars, and poor practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
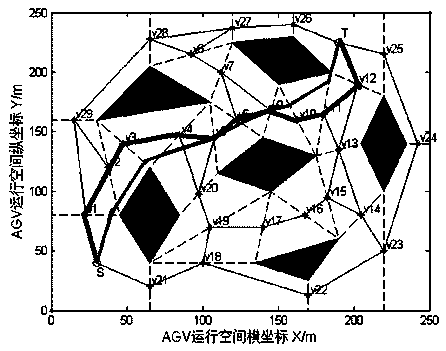
[0066] Use the link visualization method to create an AGV operating environment model. The specific steps are as follows:
[0067] (1) Process the AGV operating environment, including the following processing: a. The AGV operating environment is a two-dimensional limited space; b. The obstacles in the figure are known and their positions are determined. They are represented by irregular polygons and their height directions are ignored; c. , AGV drives at a constant speed in the operating environment, ignoring factors such as AGV's start, steering, braking, and hydraulic system lifting operations; d, based on the actual size of the AGV, appropriately expand the range of obstacles, and regard the AGV as a mass point;
[0068] (2) Use the AGV's own camera, radar sensor, infrared sensor and other equipment to collect AGV operating environment information. The information includes the AGV's initial parking space, target parking space, obstacles, and AGV to be charged. Method to cre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More