

Minimally invasive surgery robot and surgical equipment applying same
A minimally invasive surgery and robot technology, applied in the field of medical devices, can solve the problem that minimally invasive surgical robots cannot flexibly apply various endoscopic surgeries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
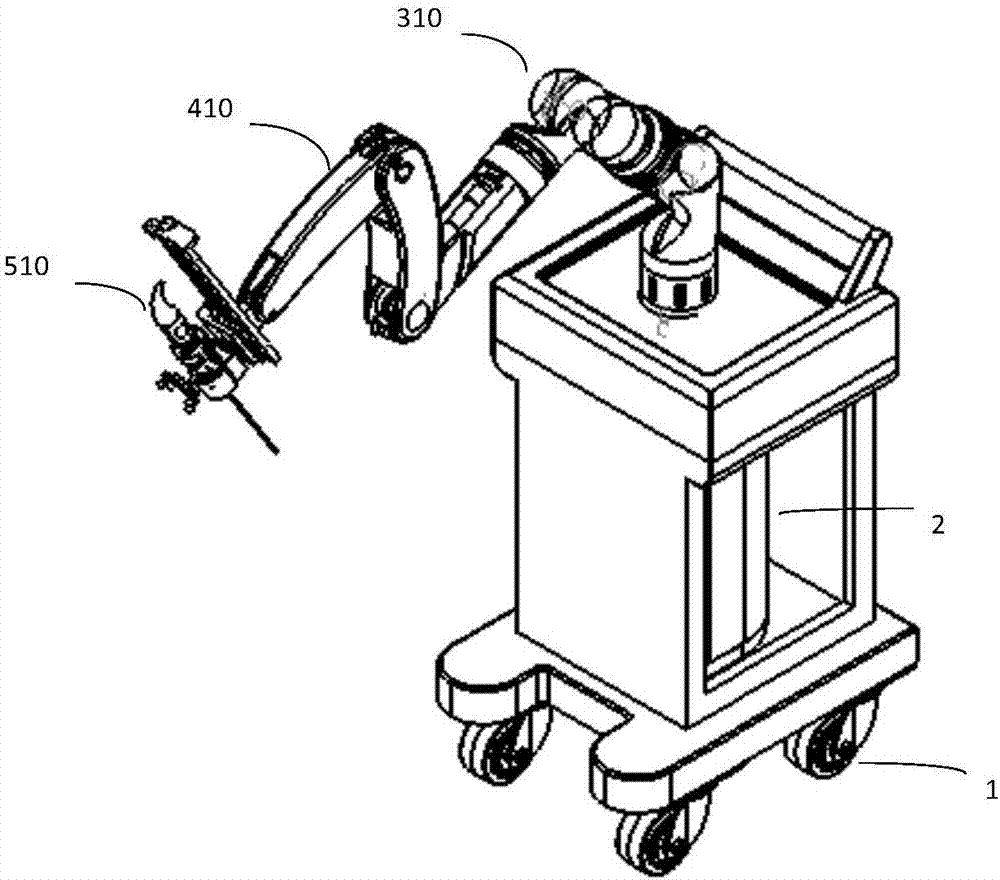
[0030] figure 1 It is a schematic structural diagram of a minimally invasive surgical robot provided by an embodiment of the present invention.
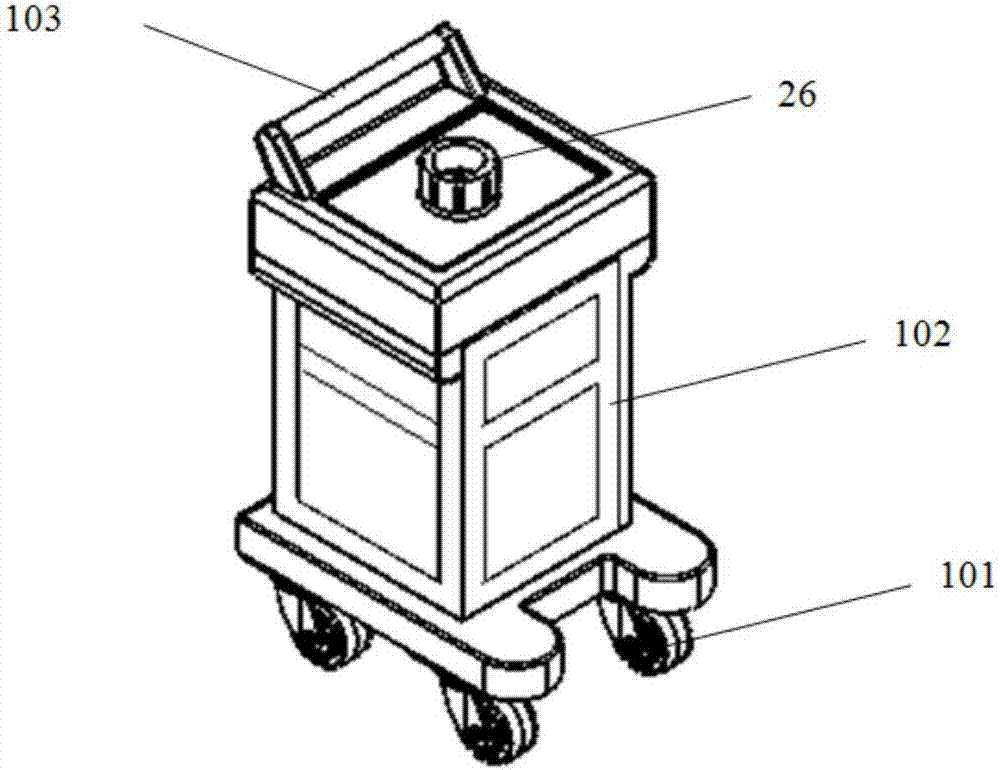
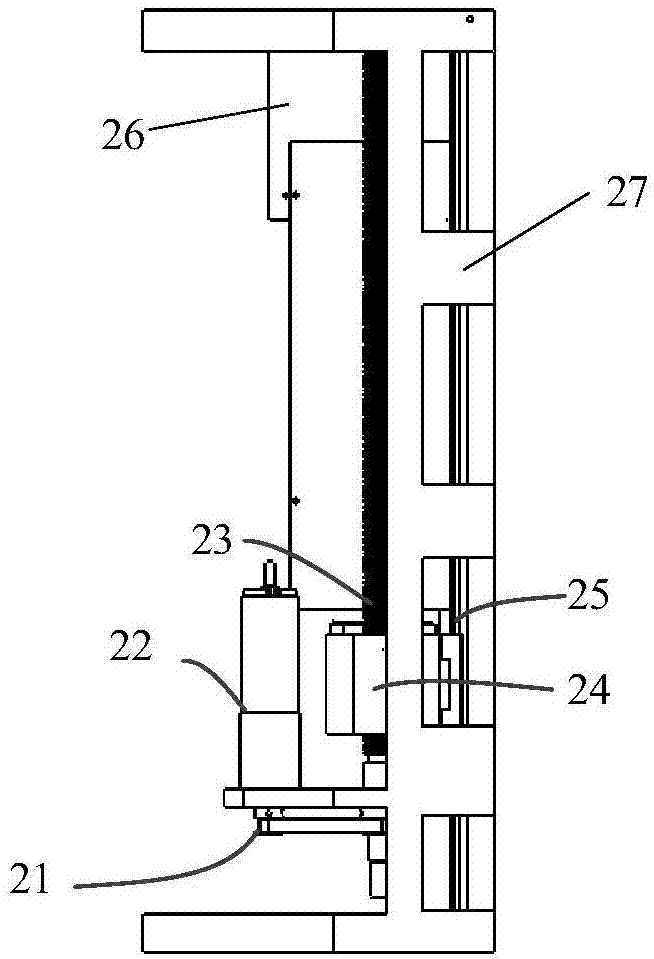
[0031] like figure 1 As shown, the embodiment of the present invention provides a minimally invasive surgical robot, including: a movable platform 1, which is used to drive the minimally invasive surgical robot to move between operating rooms; a height adjustment mechanism 2, which is located on the movable platform 1, used to adjust the height of the minimally invasive surgical robot to adapt to different operating bed heights; the position adjustment mechanism 310, the position adjustment mechanism 310 is connected with the height adjustment mechani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More