

Four-legged robot capable of adjusting attitude in air
A quadruped robot and robot technology, which is applied in the direction of aerospace vehicles, aircraft, motor vehicles, etc., can solve the problems of insufficient attitude adjustment speed, large flywheel mass, and limb interference, so as to achieve flexible attitude adjustment and save Installation space and the effect of improving the utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0018] The present invention is a quadruped robot capable of attitude adjustment in the air. The following will introduce in detail the structural diagram of different attitude transformation modes of the robot in the air and the control method and speed analysis of the flywheel.
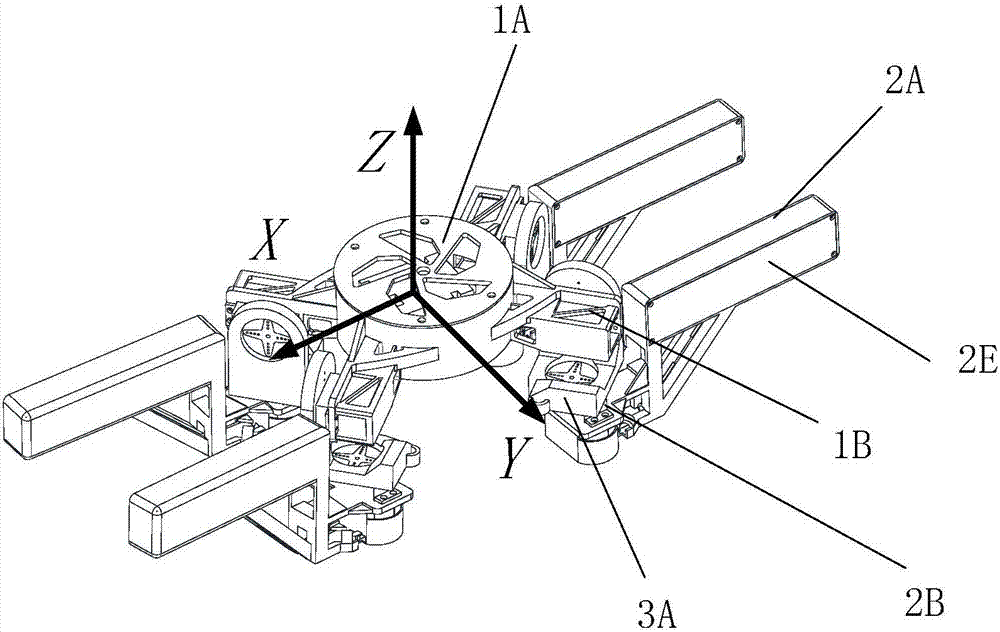
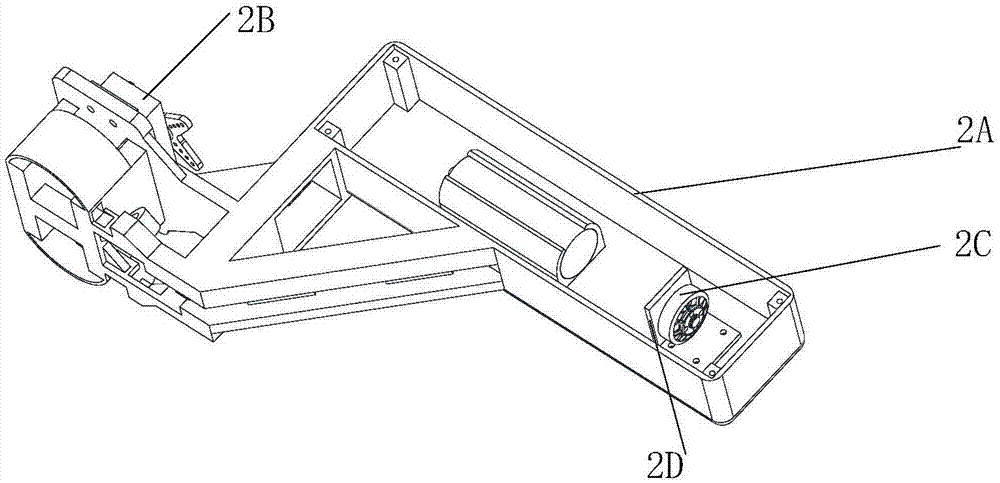
[0019] Such as figure 1 As shown, the robot is composed of a torso part 1, a limb part 2 and a connecting part 3. The limb part 2 is connected to the trunk part 1 by the connecting part 3. Specifically, the trunk motor 1B and the limb motor 2B are connected to the connector 3A to form a two-degree-of-freedom hinge. The rotation shafts of the trunk motor 1B and the limb motor 1A are mutually Perpendicular to and intersecting at a point which is the actual center of rotation of the hinge. Therefore, each limb can perform 2 degrees of freedom of rotation. The insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More