

Spatial two-degree-of-freedom flexible tail end dental implant implanter
A technology of tooth implantation and degree of freedom, applied in dentistry, dental implants, dental prosthetics, etc., can solve the problems of lack of safety, inability to complete automatic implantation, and inability to truly replace manual operations, and achieve the effect of improving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the accompanying drawings.
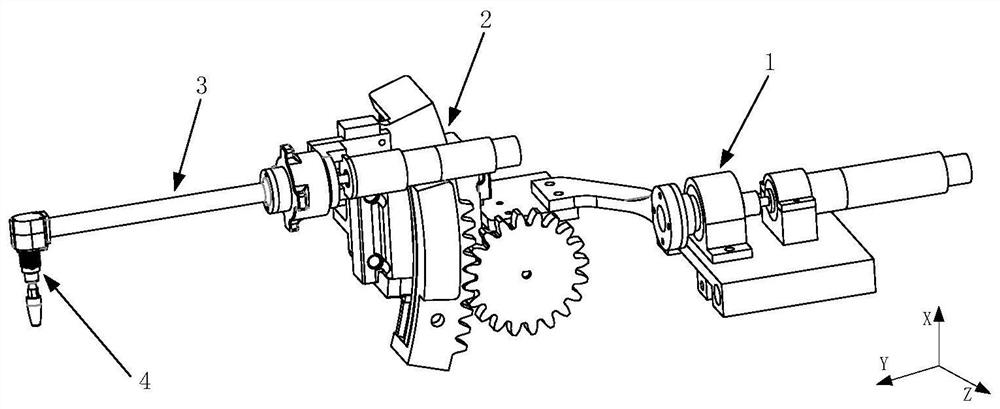
[0043] The present invention space two degrees of freedom flexible end dental implant implanter, such as figure 1 As shown, it includes a Y-axis rotation posture adjustment module 1 , a Z-axis rotation posture adjustment module 2 , an implant screw-in module 3 and a passive flexible module 4 .
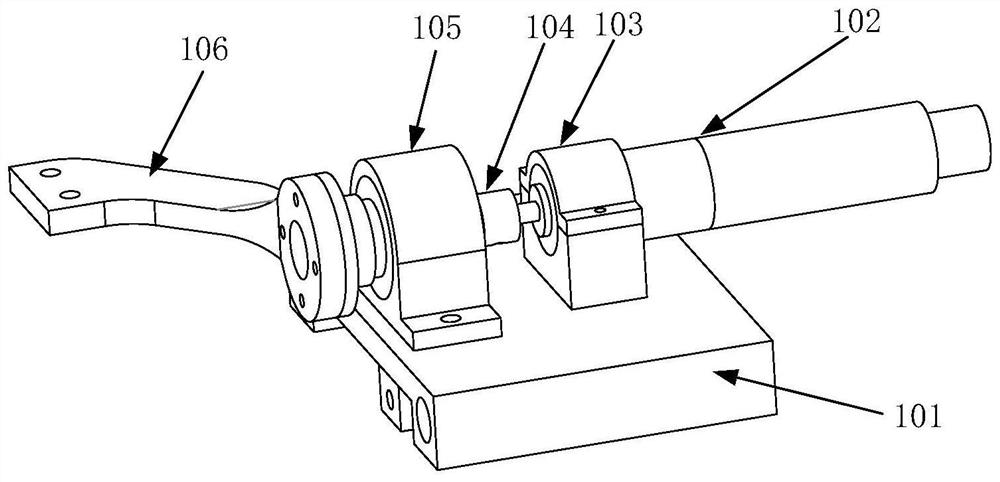
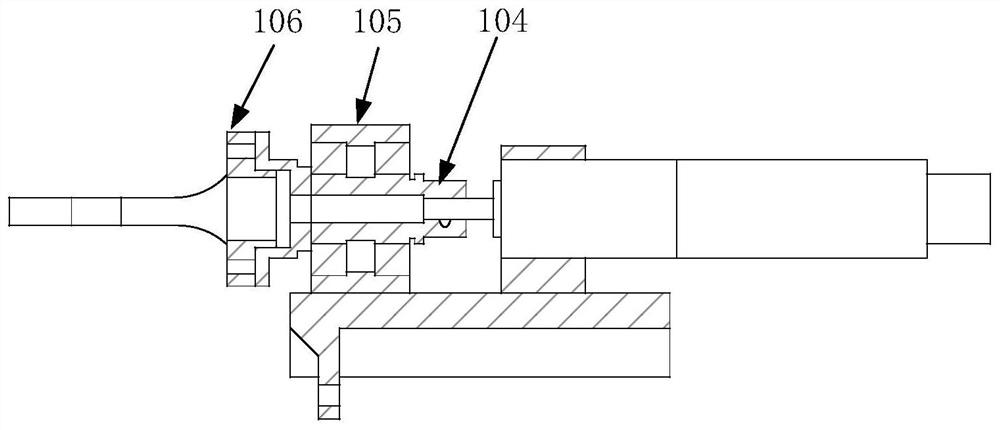
[0044] The Y-axis rotation posture adjustment module 1 includes a first base 101, a Y-axis rotation motor 102, a Y-axis rotation motor base 103, an adjustment module transmission shaft 104, a bearing seat 105 and a connecting arm 106, as figure 2 , image 3 shown. Wherein, the Y-axis rotating motor seat 103 is fixedly installed on the top surface of the first base 101, and the Y-axis rotating motor seat 103 has a hole, and the Y-axis rotating motor 102 is fixedly installed in the opening, and the output shaft of the Y-axis rotating motor 102 is along the Y-axis se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More