

Method and device for indoor navigation of unmanned aerial vehicle, unmanned aerial vehicle and storage medium
A technology for indoor navigation and drones, applied in the field of drone navigation, can solve the problems of low accuracy and efficiency of autonomous navigation of drones, and achieve the effects of reducing navigation costs, improving accuracy, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
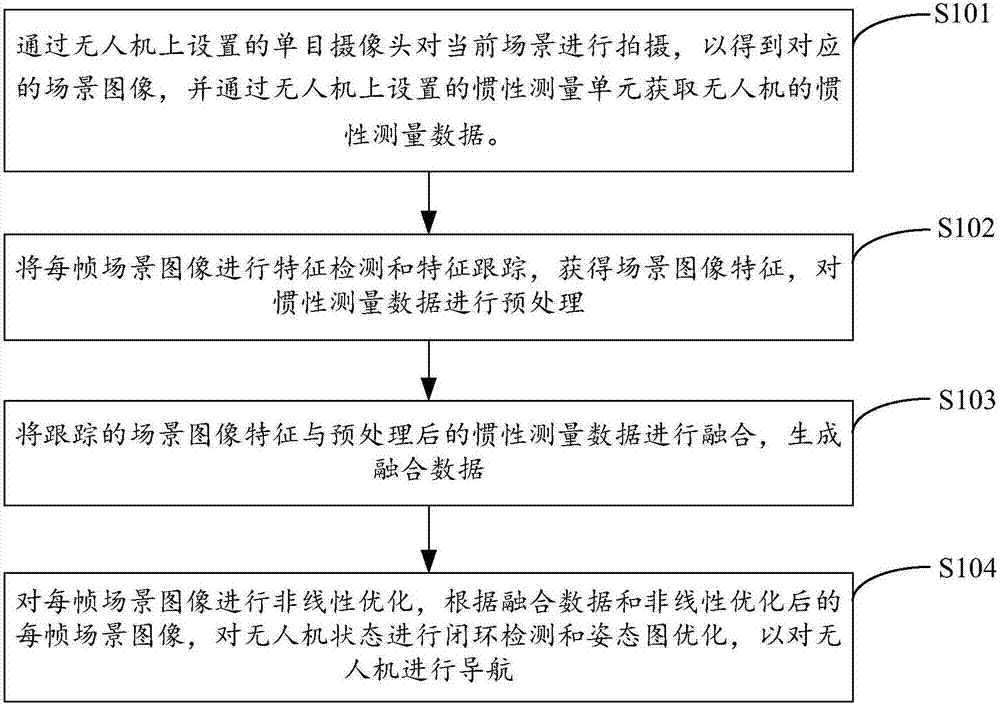
[0027] figure 1 It shows the implementation process of the UAV indoor navigation method provided by Embodiment 1 of the present invention. For the convenience of description, only the parts related to the embodiment of the present invention are shown, and the details are as follows:
[0028] In step S101, the current scene is photographed by a monocular camera set on the drone to obtain a corresponding scene image, and the inertial measurement data of the drone is obtained by an inertial measurement unit set on the drone.
[0029] In the embodiment of the present invention, the visual sensor provided on the drone is a monocular camera. In addition to the visual sensor, an inertial measurement unit (IMU, Inertialmeasurement unit) for inertial measurement of the drone is additionally set up on the drone. ), the inertial measurement data of the drone can be measured. The embodiment of the present invention combines the monocular camera with the inertial measurement unit to realiz...
Embodiment 2
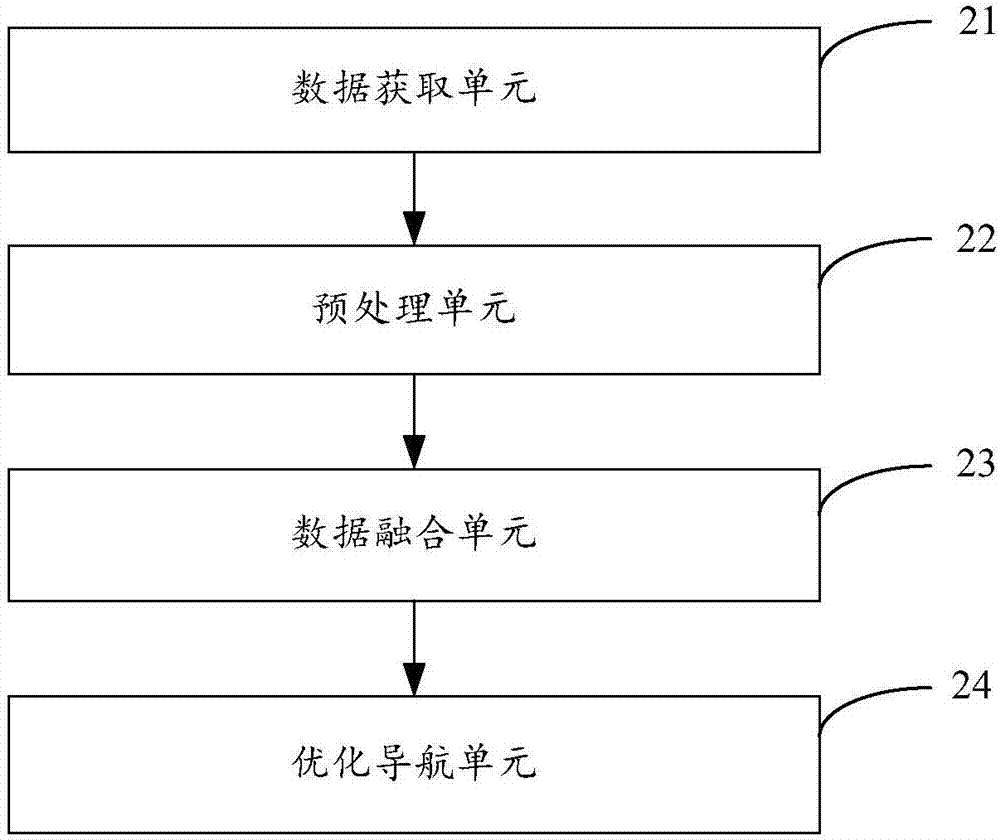
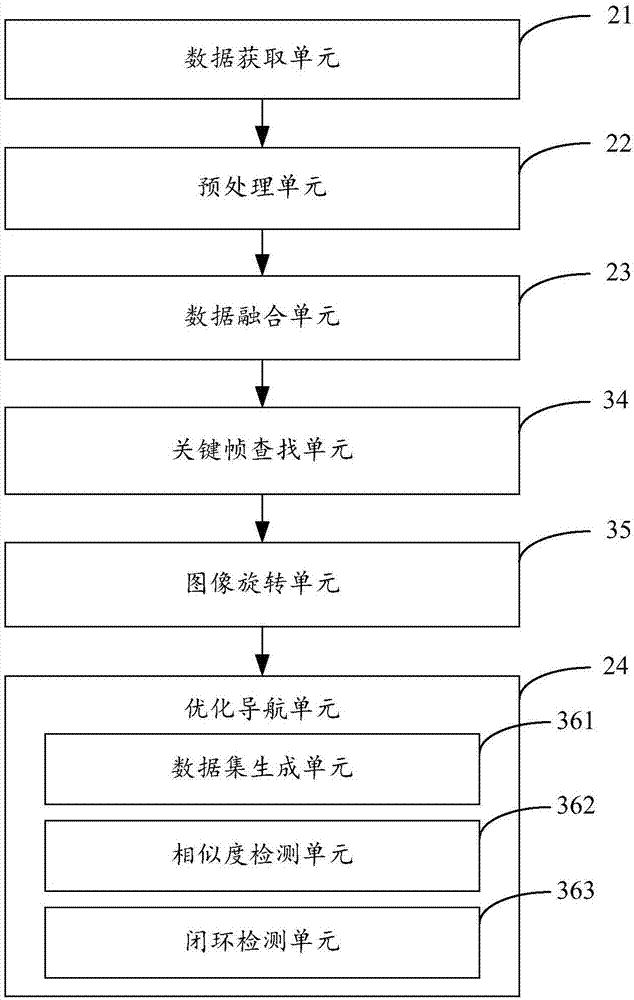
[0043] figure 2 The structure of the drone indoor navigation device provided by the second embodiment of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, including:
[0044] The data acquisition unit 21 is used to shoot the current scene through the monocular camera set on the drone to obtain the corresponding scene image, and acquire the inertial measurement data of the drone through the inertial measurement unit set on the drone.
[0045] In the embodiment of the present invention, the visual sensor set on the drone is a monocular camera. In addition to the visual sensor, an inertial side face unit for inertial measurement of the drone is set up on the drone, which can be measured to obtain For the inertial measurement data of the drone, the embodiment of the present invention realizes the autonomous navigation of the drone in an indoor environment where the global positioning si...
Embodiment 3
[0066] Figure 4 The structure of the drone provided by the third embodiment of the present invention is shown, and for the convenience of description, only the parts related to the embodiment of the present invention are shown.
[0067] The drone 4 in the embodiment of the present invention includes a processor 40 , a memory 41 and a computer program 42 stored in the memory 41 and operable on the processor 40 . When the processor 40 executes the computer program 42, the steps in the above-mentioned method embodiments are realized, for example figure 1 Steps S101 to S104 are shown. Alternatively, when the processor 40 executes the computer program 42, the functions of the units in the above-mentioned device embodiments are realized, for example figure 2Function of units 21 to 24 shown.
[0068] In the embodiment of the present invention, the scene image is captured by the monocular camera on the drone, and the inertial measurement data is obtained by the inertial measureme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More