

Automobile yaw stability control method based on gain scheduling
A control method and yaw stabilization technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem that the yaw rate of the vehicle cannot track its reference value, etc., and achieve the effect of excellent self-adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
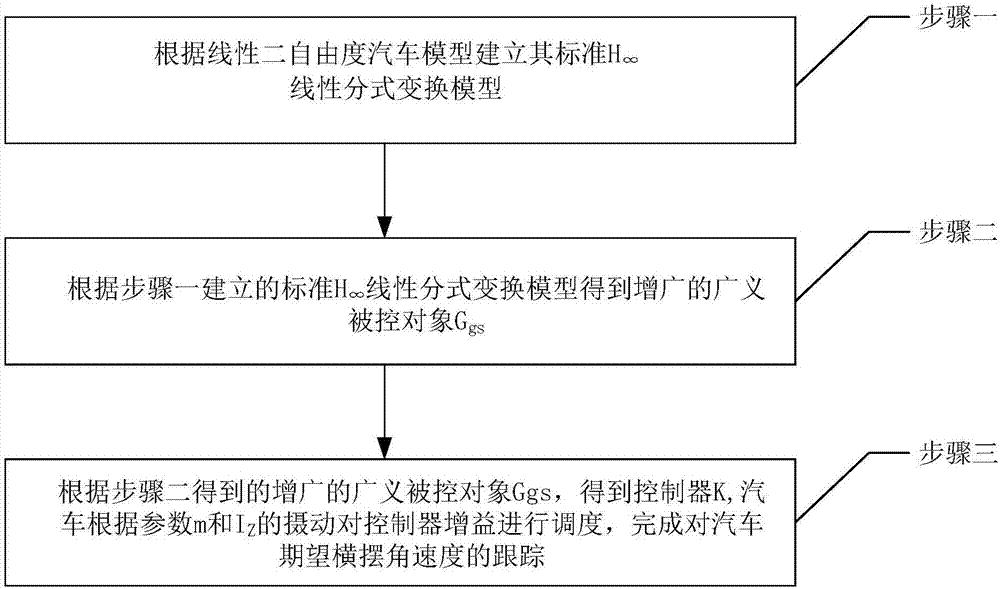
[0030] Specific implementation mode one: as figure 1 As shown, a vehicle yaw stability control method based on gain scheduling includes the following steps:
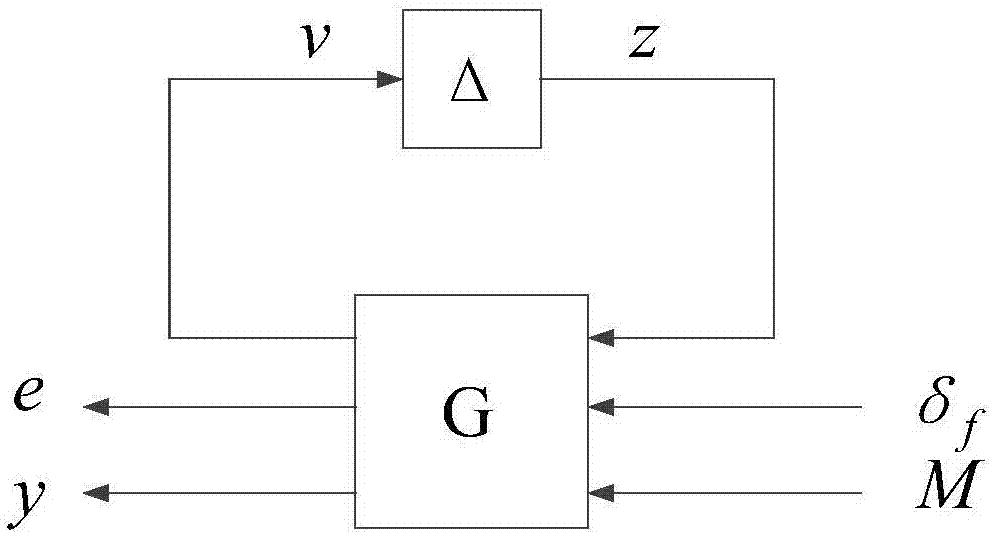
[0031] Step 1: Establish a standard based on a linear two-degree-of-freedom vehicle model The linear fraction transformation model is:
[0032]
[0033] Where e is the tracking error, y is the measurement output, F u (G, Δ) is the upper linear fractional transformation of G and Δ, G is the generalized controlled object, Δ is the independently separated parameter uncertainty multiplier, δ f is the front wheel rotation angle, M is the yaw moment input;
[0034]
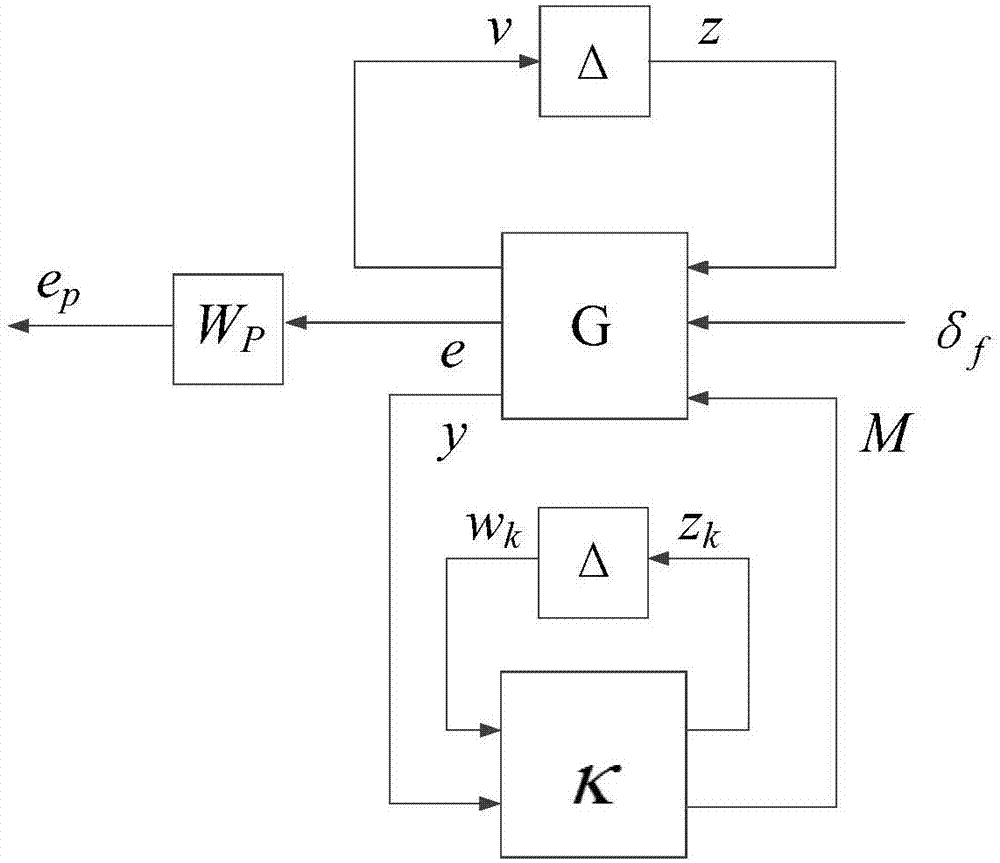
[0035] Step 2: Based on the criteria established in Step 1 The augmented generalized plant G obtained from the linear fraction transformation model gs (G gs Add input (w k ,z k ) and output (w k ,z k ) augmented generalized accused object);
[0036] Step 3: The augmented generalized controlled object G obtained from Step 2 gs , to obtain the co...
specific Embodiment approach 2
[0038] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the step 1, the standard is established according to the linear two-degree-of-freedom automobile model The specific process of linear fraction transformation model is as follows:
[0039] Such as figure 2 As shown, considering the two-degree-of-freedom vehicle model of the vehicle's lateral motion and yaw motion, the dynamic state equation of the vehicle is:
[0040]
[0041] in
[0042] β is the sideslip angle of the center of mass, γ is the yaw rate, is the first derivative of β, is the first derivative of γ, δ f is the front wheel rotation angle, M is the yaw moment input, I z is the vehicle yaw moment of inertia, c αf and c αr are the cornering stiffness of the front and rear wheels respectively, u is the longitudinal speed of the vehicle, a is the distance from the center of mass to the front axle, b is the distance from the center of mass to the rea...
specific Embodiment approach 3
[0056] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the parameter perturbation model is expressed as:
[0057] m=m 0 +ξ 1 W m
[0058] I z =I 0 +ξ 2 W I
[0059] where |ξ 1 |≤1, |ξ 2 |≤1.
[0060] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More