

ACC/AEB system based on human-imitating driving and vehicle
An anthropomorphic and vehicle technology, applied in two-dimensional position/channel control, etc., can solve the problems of small sample size of control parameters, unsuitable driving habits, unpleasant feeling, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
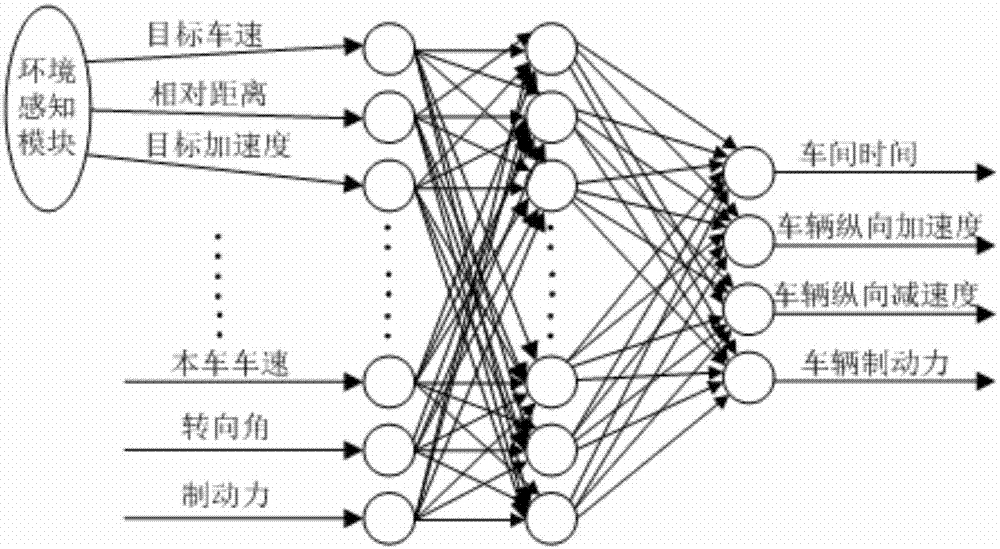
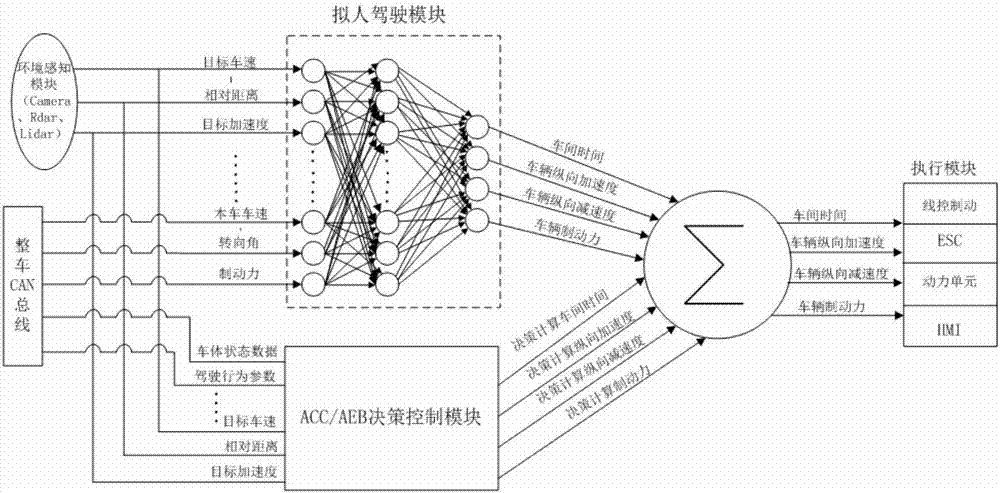
[0088] refer to figure 1 , image 3 , the concrete scheme that the present invention adopts single sensor is:
[0089] The environmental perception module includes machine vision sensors (monocular camera, binocular camera and 3D camera), 77GHz millimeter-wave radar, lidar and car networking V2X.
[0090] If the system has only one of the above-mentioned sensors as a sensing device, the data collected by a single sensor is filtered, identified, tracked and identified as a dangerous target, and the speed, relative distance, acceleration, deceleration, azimuth and other related parameters of the dangerous target are sent to the Anthropomorphic driving module; the anthropomorphic driving module combines the target motion parameters, driver's driving behavior parameters, and the vehicle's own operating parameters into the enhanced artificial neural network, through the driver's long-term driving process. Carry out training rate and learning, obtain the weights between each neuro...
Embodiment 2
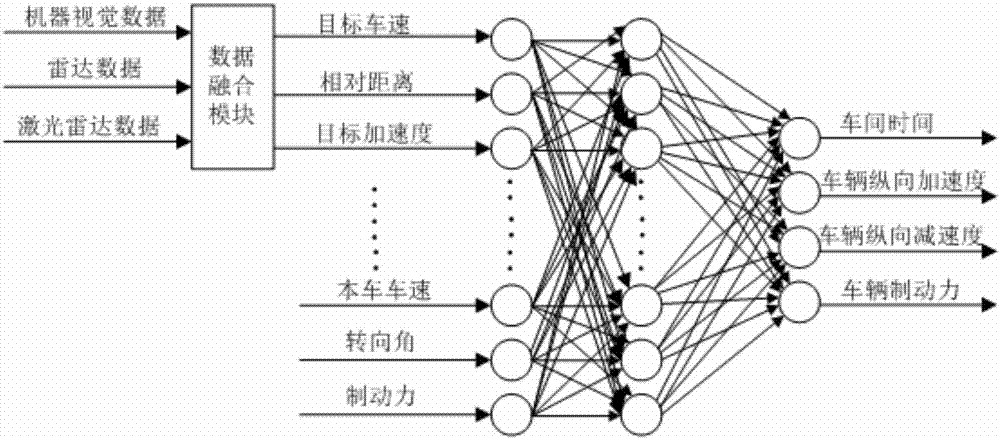
[0094] refer to figure 2 , Figure 4 , the present invention adopts the multi-sensor fusion scheme as:
[0095] The environmental perception module includes machine vision sensors (monocular camera, binocular camera and 3D camera), 77GHz millimeter-wave radar, lidar and car networking V2X.
[0096] The system fuses two or more sensors, and sends relevant parameters such as the speed, relative distance, acceleration, deceleration, and azimuth angle of the dangerous target to the humanoid driving module; the humanoid driving module combines the target motion parameters with the driver's driving Behavioral parameters and the vehicle's own operating parameters are sent to the enhanced artificial neural network, and the driver continuously trains and learns between the layers of the neural network and the neurons during the long-term driving process to obtain To obtain the optimal driving behavior parameters of the driver during the driving process, such as headway distance, bra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More