

Handheld flexible multi-joint surgical instrument for abdominal cavity minimally invasive surgery
A technology of minimally invasive surgery and surgical instruments, applied in the direction of surgical forceps, etc., can solve problems such as low flexibility and rigid structure restrictions, and achieve the effects of improving safety, reducing finger force, and reducing operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
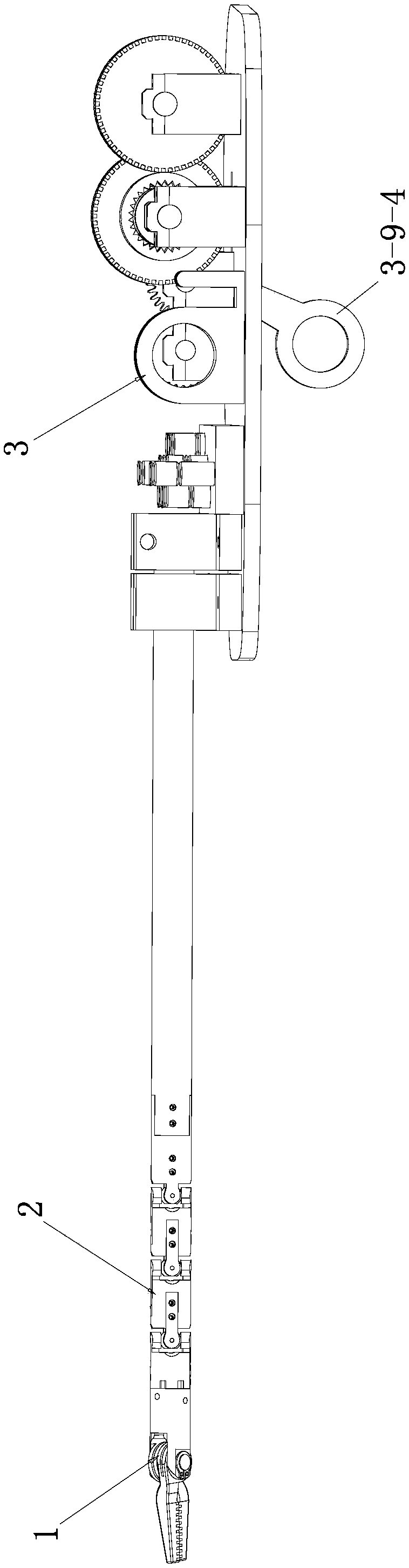
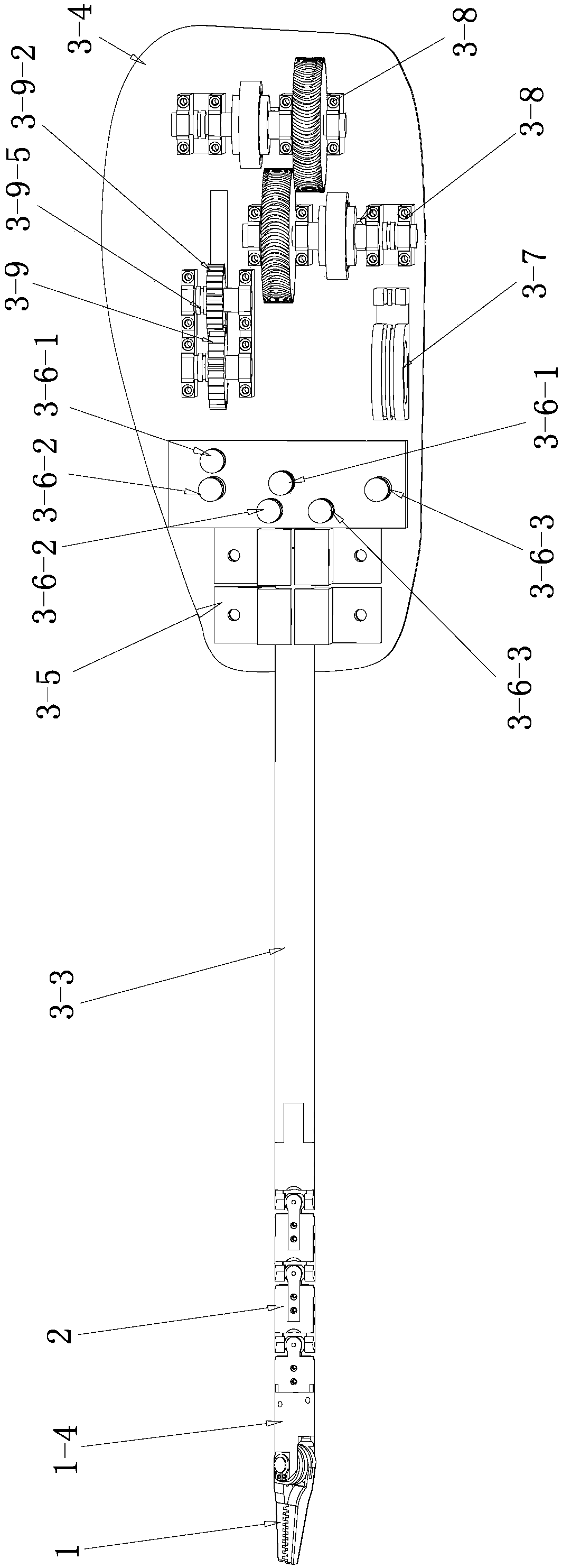
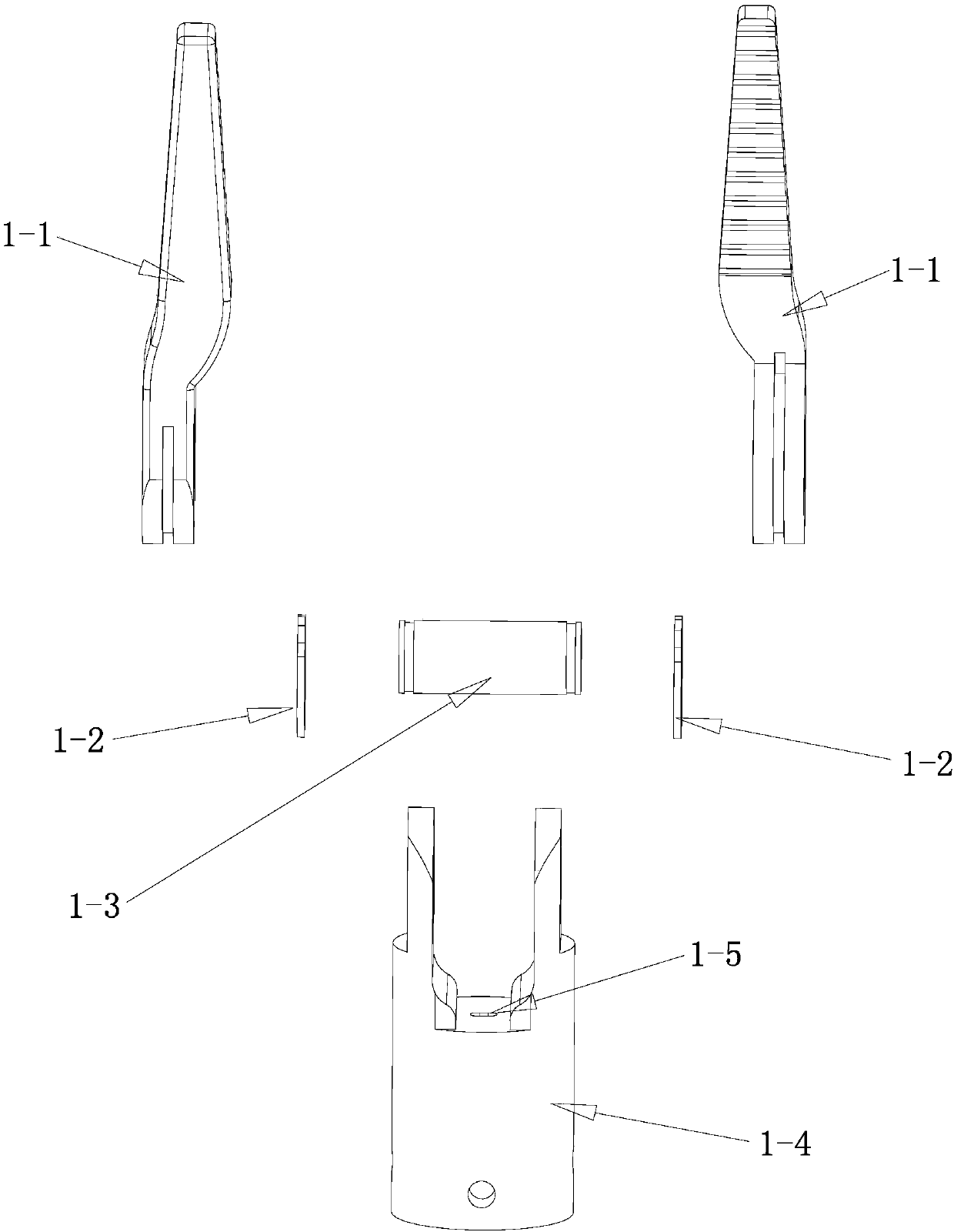
[0029] see Figure 1-Figure 12 Explain that a hand-held flexible multi-joint surgical instrument for minimally invasive abdominal surgery includes an end surgical forceps mechanism 1, a wrist flexible multi-joint 2 and a control box 3;
[0030] The wrist flexible multi-joint 2 includes a plurality of Hooke hinges 2-1 connected head to tail with the same structure, the Hooke hinge 2-1 at the head end of the wrist flexible multi-joint 2 is connected with the terminal surgical forceps mechanism 1, and the terminal surgical forceps Mechanism 1 has a center through hole 1-5 for wire routing, and Hooke hinge 2-1 has a center through hole 2-1-0 for wire passing and a wire passing hole 2-1-3 for controlling movement;
[0031] The control box 3 includes a shell, a wire conduit 3-3, a base plate 3-4, a gear transmission mechani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More