Rotation type double-arm manipulator
A robotic hand and rotary technology, applied in the field of robotics, can solve the problems of large occupied space, complex structure, and inability to change the range, and achieve the effect of simple structure, small occupied space, and changing the range of activities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
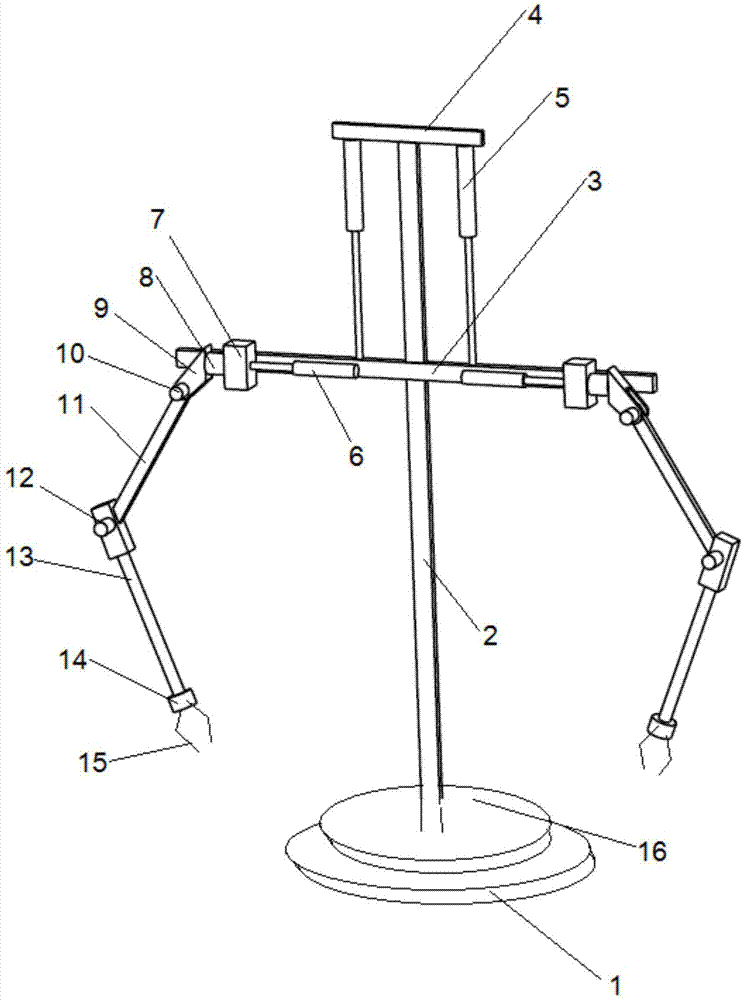
[0031] see figure 1 , a rotary dual-arm robot with:
[0032] chassis;
[0033] a turntable, rotatably mounted on the chassis;
[0034] The rotating motor is fixed in the chassis, and the rotating shaft of the rotating motor is fixedly connected with the turntable; the rotation of the turntable drives the whole device to rotate.
[0035] The vertical rod is vertically fixed on the turntable;
[0036] A cross bar, slidably mounted on the vertical bar; the cross bar can slide to change the range of motion in height.
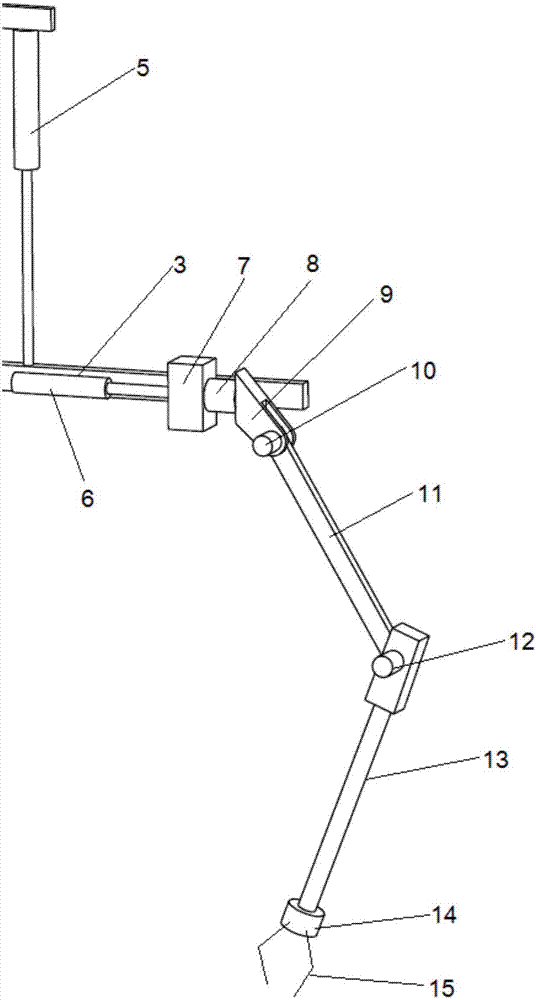
[0037] There is a robot arm structure at each end of the crossbar, and the robot arm structure has:
[0038] The first base is slidably installed on the crossbar; the first base can slide to change the range of motion i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com