

Method and device for determining feature points during synchronous positioning and map construction
A map construction and synchronous positioning technology, applied in the field of cloud map construction, can solve problems such as consuming computing resources and affecting the accuracy of point clouds, and achieve the effects of improving sparsity, construction speed, and positioning speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
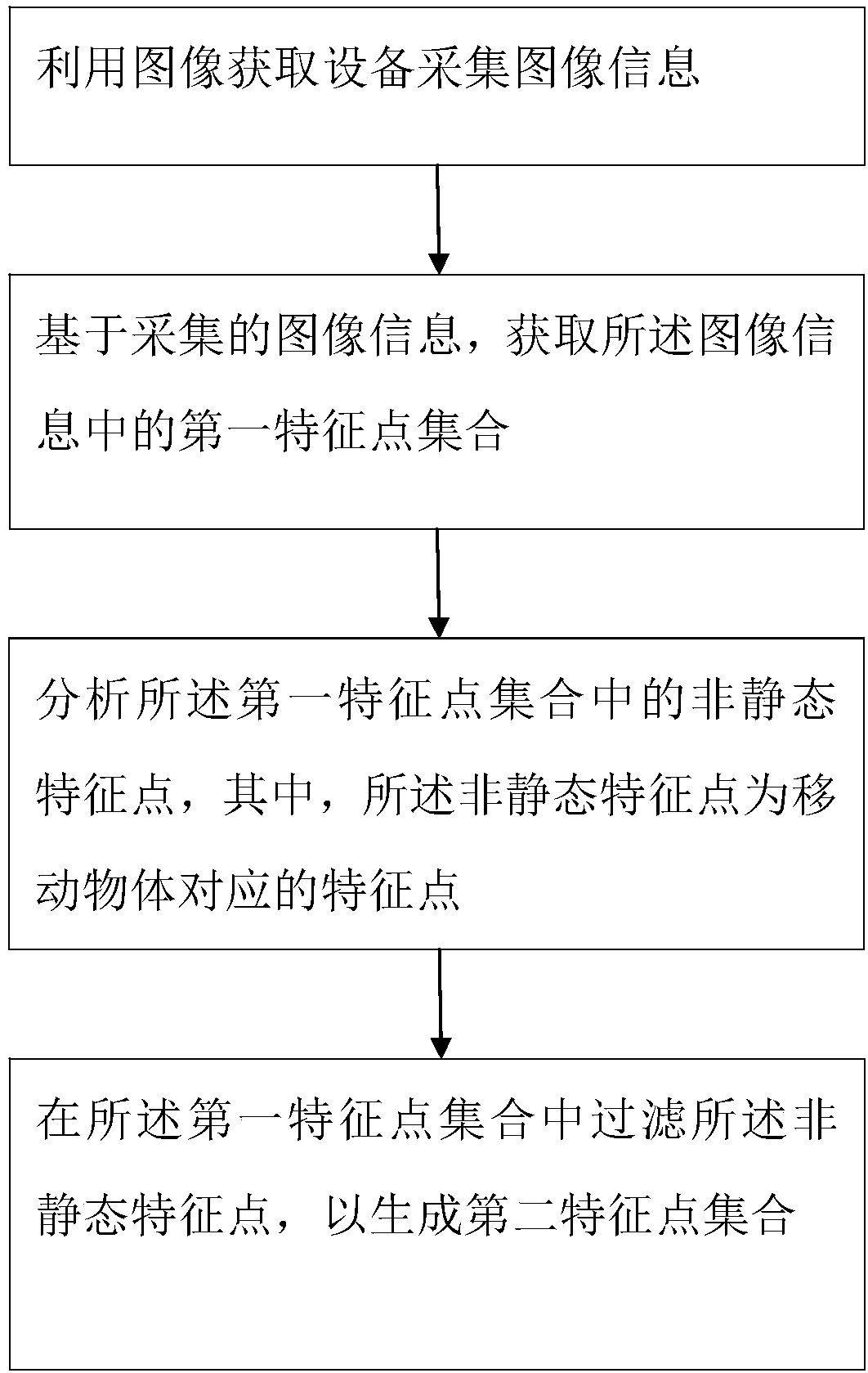
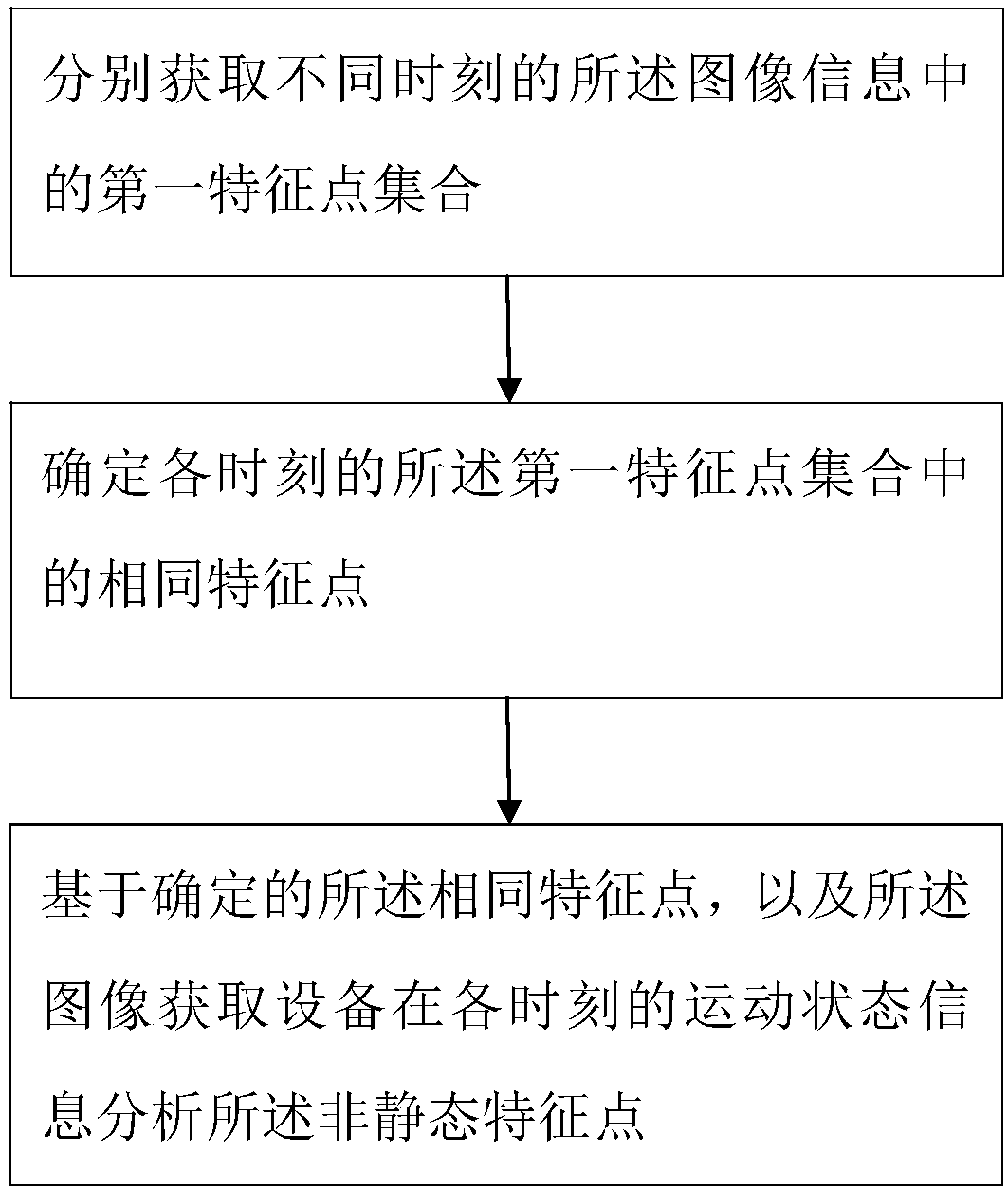
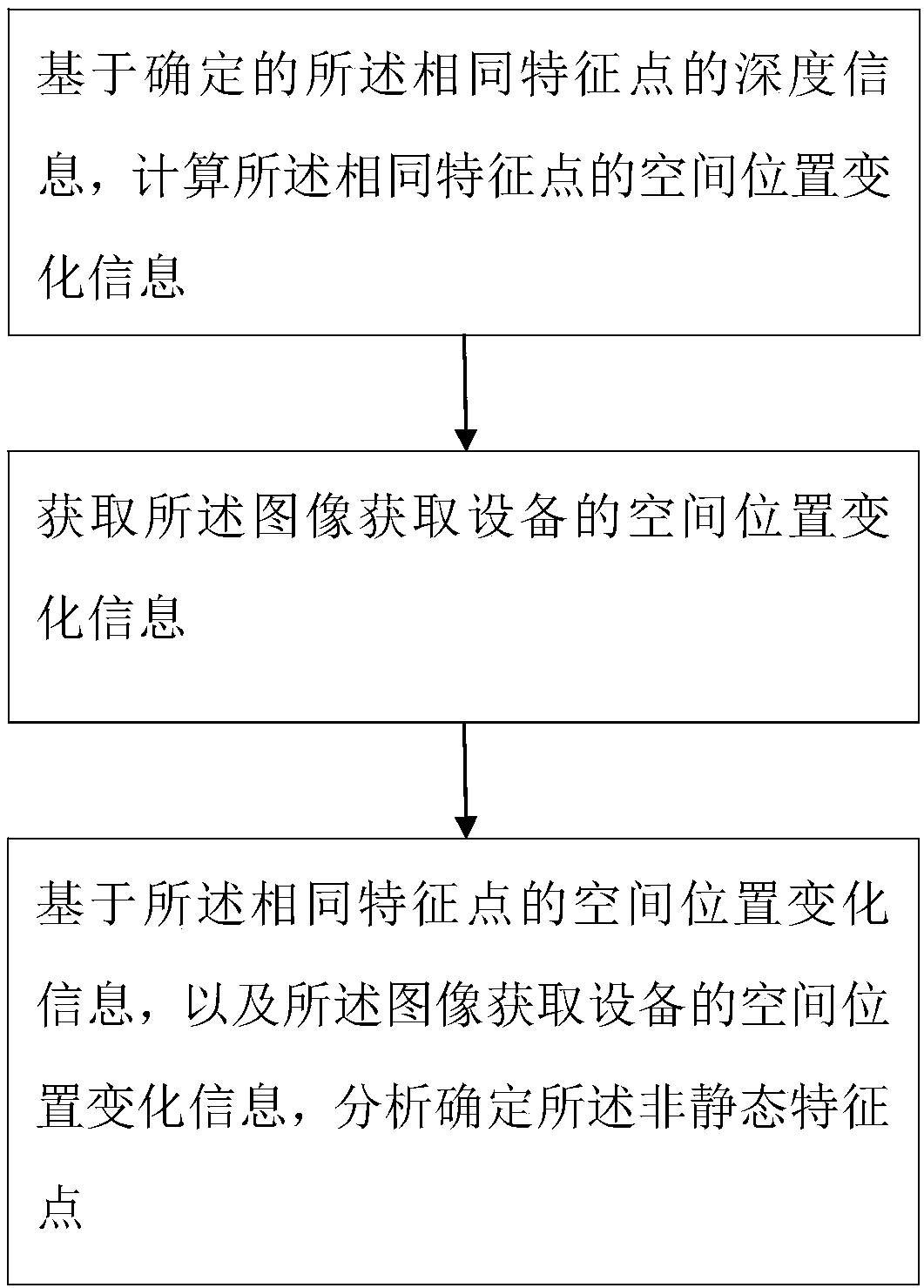
Method used
Image

Examples
Embodiment Construction
[0048] Below, specific embodiments of the present invention will be described in detail in conjunction with the accompanying drawings, but they are not intended to limit the present invention.
[0049] It should be understood that various modifications may be made to the embodiments disclosed herein. Accordingly, the above description should not be viewed as limiting, but only as exemplifications of embodiments. Those skilled in the art will envision other modifications within the scope and spirit of the disclosure.
[0050] The accompanying drawings, which are incorporated in and constitute a part of this specification, illustrate embodiments of the disclosure and, together with the general description of the disclosure given above and the detailed description of the embodiments given below, serve to explain the embodiments of the disclosure. principle.
[0051] These and other characteristics of the invention will become apparent from the following description of preferred...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More