

Obstacle-crossing robot
A technology of robots and bodies, applied in the field of robots, can solve the problems of high cost, unfavorable production, and slow speed of crossing obstacles, etc., and achieve the effects of easy production and processing, simple structure, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below by means of specific embodiments:
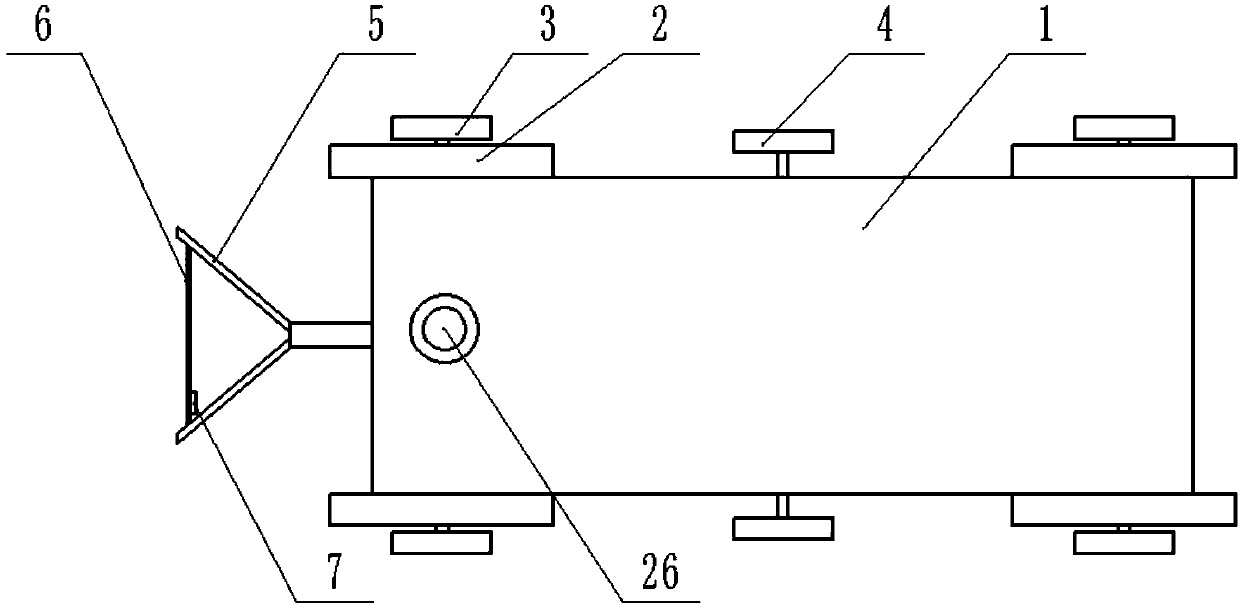
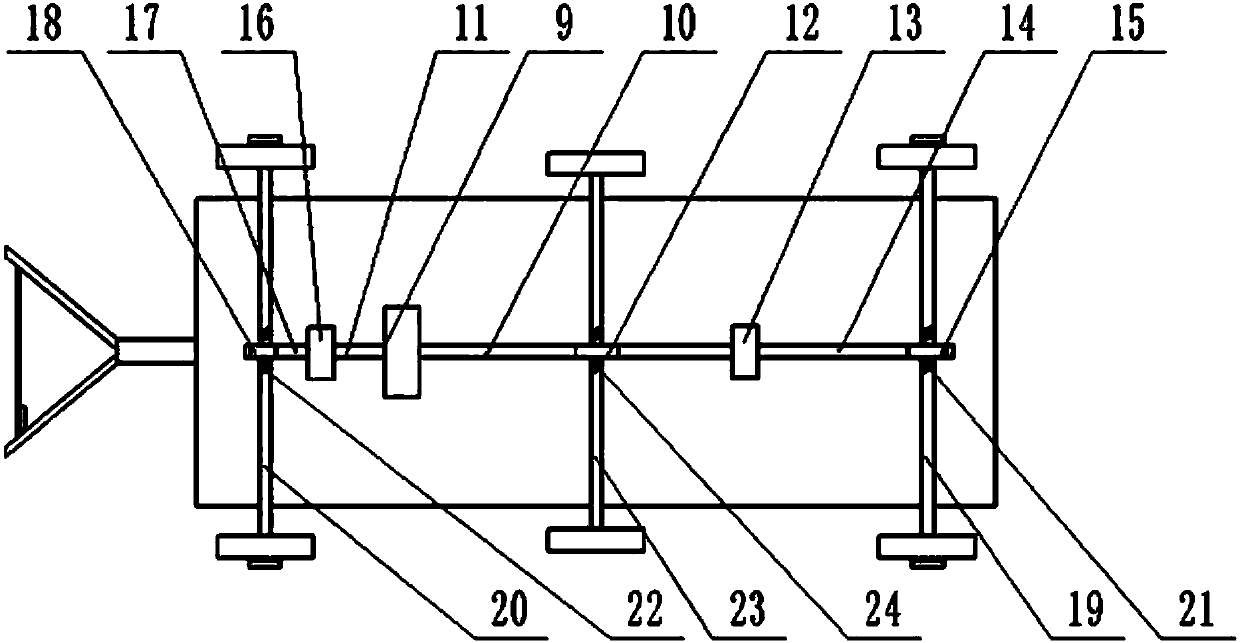
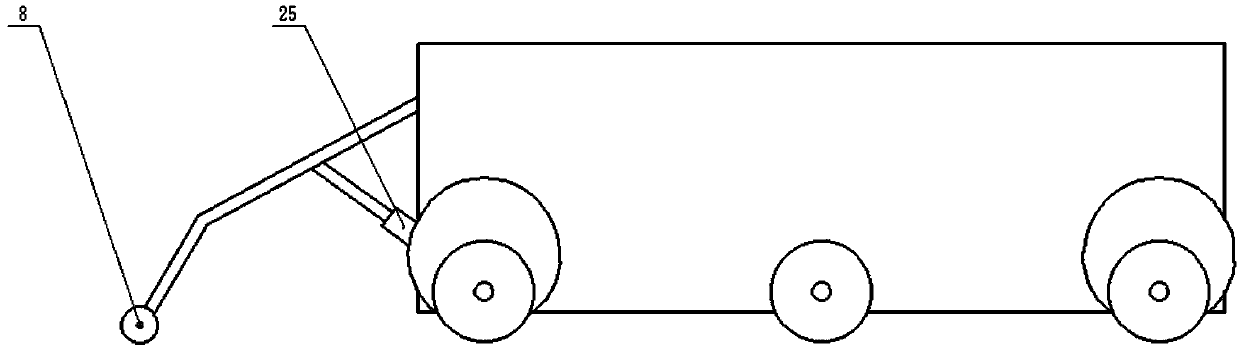
[0021] The reference signs in the drawings of the description include: body 1, eccentric wheel 2, follower wheel 3, round wheel 4, detection claw 5, elastic rope 6, strain sensor 7, roller 8, double output shaft motor 9, first output Shaft 10, second output shaft 11, first worm gear 12, first clutch 13, first transmission shaft 14, second worm gear 15, second clutch 16, second transmission shaft 17, third worm gear 18, first eccentric wheel Rotating shaft 19, the second eccentric wheel rotating shaft 20, the second worm screw 21, the third worm screw 22, the circular wheel rotating shaft 23, the first worm screw 24, the cylinder 25, the warning light 26.
[0022] Such as figure 1 , figure 2 As shown, the obstacle-crossing robot of this embodiment includes a body 1, and four eccentric wheels 2, two round wheels 4 and four follower wheels 3 are symmetrically installed on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More