

Variable topology spoke walking biped robot
A biped robot and variable topology technology, applied in the field of robotics, can solve the problems of low walking efficiency, high energy consumption, large foot structure, etc., and achieve the effect of high walking efficiency and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific embodiments and examples of the present invention will be described in detail below in conjunction with the accompanying drawings. The described specific embodiments are only used to explain the present invention, and are not intended to limit the specific embodiments of the present invention.
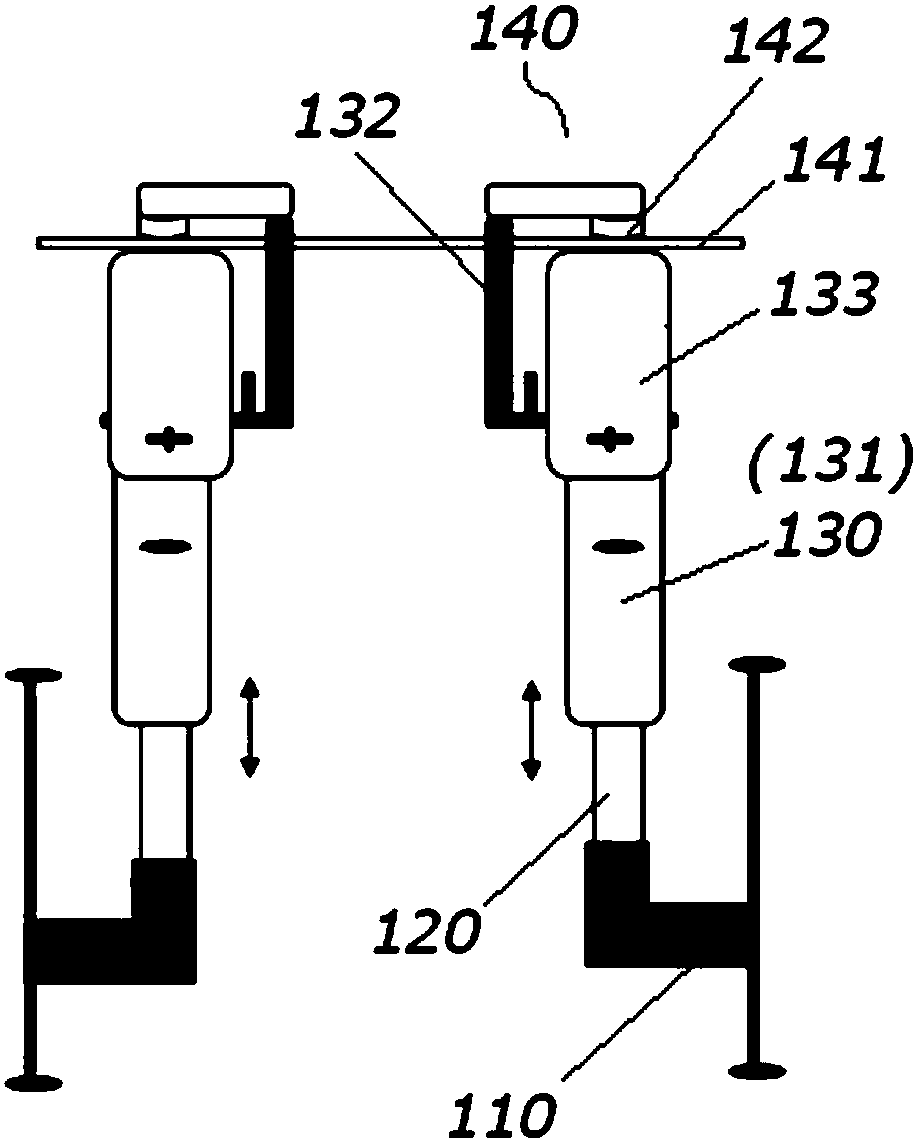
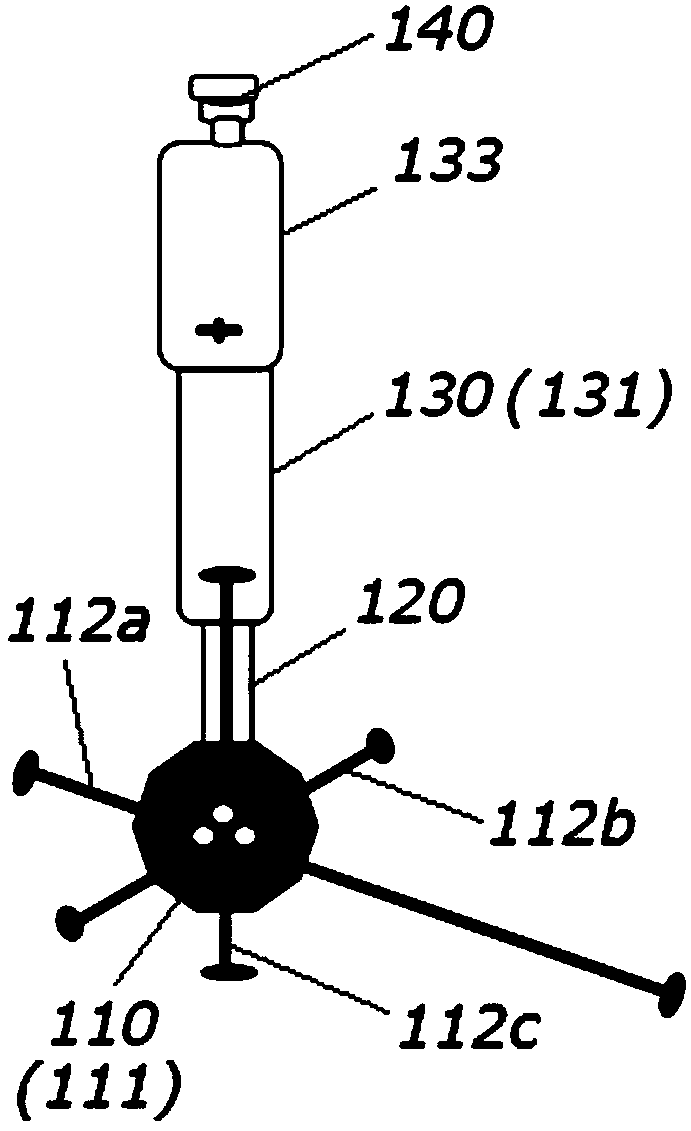
[0023] like figure 1 and 2 as shown, figure 1 It is a schematic front view of the structure of the embodiment of the walking biped robot with variable topology spokes, figure 2 It is a schematic side view of the structure of an embodiment of the walking biped robot with variable topology spokes, which includes left and right wheel foot assemblies 110, left and right calf assemblies 120, left and right thigh assemblies 130, and hip joint assemblies 140; The left and right wheel foot assemblies 110 are respectively connected to the lower ends of the left and right calf assemblies 120 , the left and right calf assemblies 120 are connected to the lower parts of the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More