

Single-rotor-wing wheel foot type robot applied in multiple occasions
A robot and single-rotor technology, applied in the field of robots, can solve the problems of inability to carry out on-site rescue, difficult commercial promotion, and small practical value, and achieve the effects of simple structure, large load, and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific embodiments and embodiments of the present invention will be described in detail below with reference to the accompanying drawings. The specific embodiments described are only used to explain the present invention, and are not used to limit the specific embodiments of the present invention.
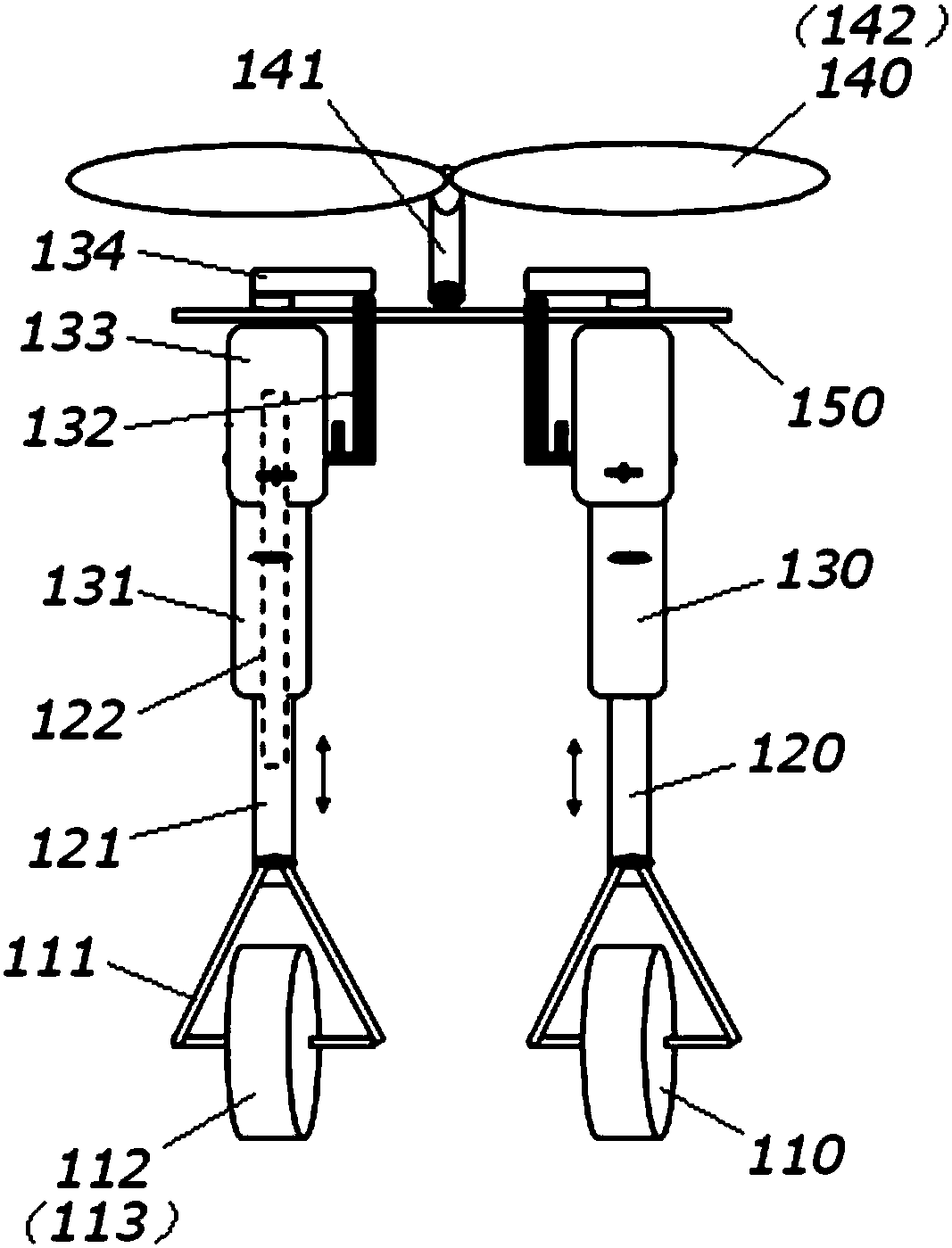
[0017] like figure 1 shown, figure 1 It is a schematic structural diagram of an embodiment of the single-rotor wheel-footed multi-robot of the present invention. The single-rotor wheel-leg multi-robot includes left and right wheel foot assemblies 110, left and right calf assemblies 120, left and right thigh assemblies 130, and rotor assemblies 140; the left and right wheel foot assemblies 140; The wheel foot assemblies 110 are respectively connected to the lower ends of the left and right calf assemblies 120. The left and right calf assemblies 120 are connected to the lower parts of the left and right thigh assemblies 130 and can be retracted. The upper ends of the lef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More