

Hole-digging tree-planting robot for gardens
A robot and gardening technology, which is applied in planting methods, applications, excavation/covering ditches, etc., can solve the problems of time-consuming and labor-intensive backfilling, waste of manpower, etc., and achieve the effects of labor saving, simple production and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
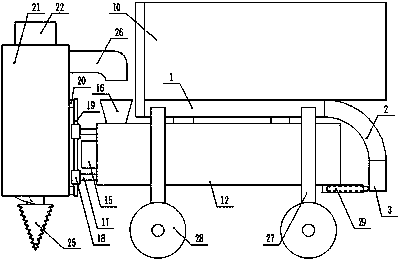
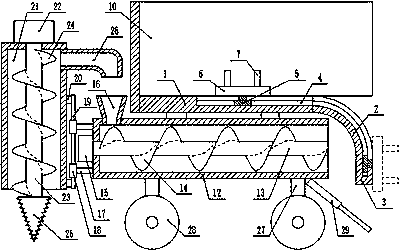
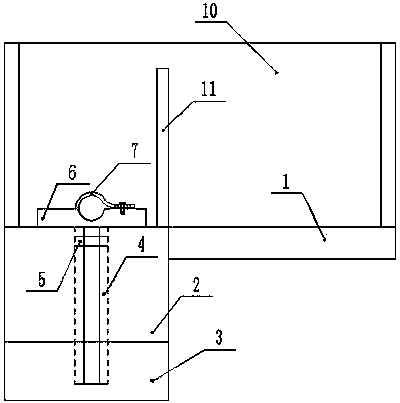
[0016] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, a garden digging tree planting robot includes a horizontal plate 1, the side edge of the horizontal plate 1 is fixed with an arc-shaped plate 2, and the lower end of the arc-shaped plate 2 is vertically fixed with a vertical plate 3, and the horizontal plate 1, The arc-shaped plate 2 and the vertical plate 3 are integrally formed with equal thickness, and the horizontal plate 1, the arc-shaped plate 2, and the vertical plate 3 are provided with a T-shaped slot 4, and a T-shaped slider 5 is slidably connected to the T-shaped slot 4 , the upper end of the T-shaped slider 5 is fixed with a slide plate 6, and the slide plate 6 is hinged with a plurality of fixed belts 7, and the fixed belt 7 is provided with a plurality of through holes 8, and the fixed belt 7 is inserted throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More