

AUV collaborative navigation method based on non-linear information filtering
A technology of information filtering and cooperative navigation, which is applied in the direction of navigation computing tools, etc., can solve the problems that AUVs cannot receive cooperative navigation information, the delay limit of underwater acoustic navigation information, and the decrease of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
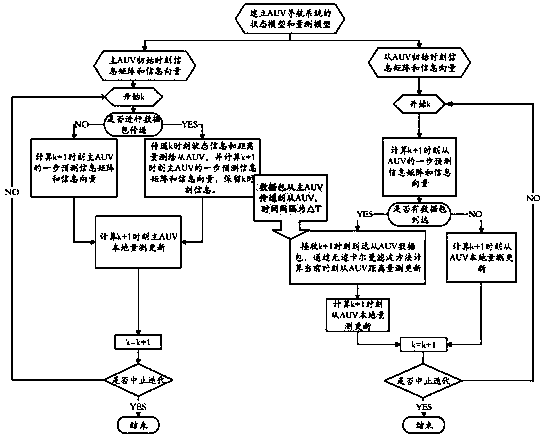
[0091] The present invention is an AUV cooperative navigation method based on nonlinear information filtering, comprising the following steps:
[0092] (1) Establish the state equation and measurement equation describing the AUV cooperative navigation system. Specifically, the nonlinear system model is established as follows:
[0093]
[0094] Among them, the state equation is x k =f(x k-1 )+n k-1 , the observation equation is z k =h(x k )+v k , x k is the n-dimensional state vector at the kth moment, representing the position information and velocity information of the AUV, z k is the m-dimensional measurement vector at the kth moment, which represents the azimuth observation information of the AUV, f( ) and h( ) are known nonlinear functions, n k-1 is the n-dimensional system noise at the k-1th moment, v k is the m-dimensional observati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More