

Center fixation type quick clamping mechanical hand used for forging robot
A technology of robots and manipulators, applied in the field of center-fixed fast clamping manipulators, which can solve problems such as error-prone, safety accidents, and long cooling time of gripper jaws, to eliminate errors in program switching, improve replacement efficiency, and reduce replacement times Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
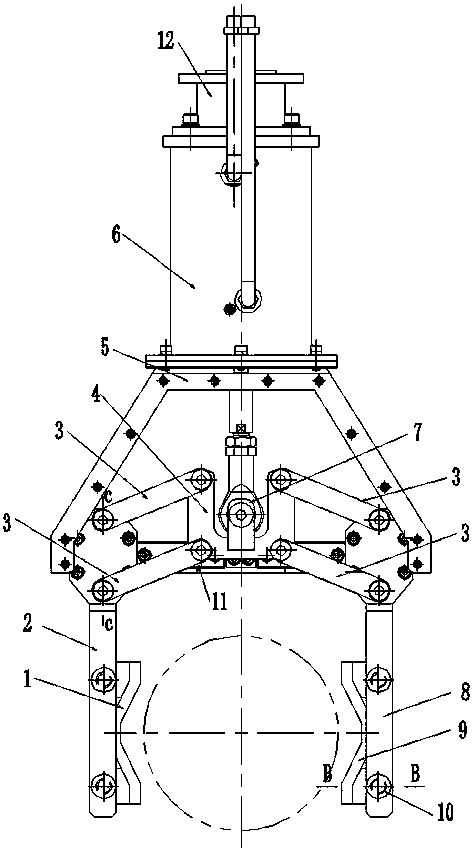
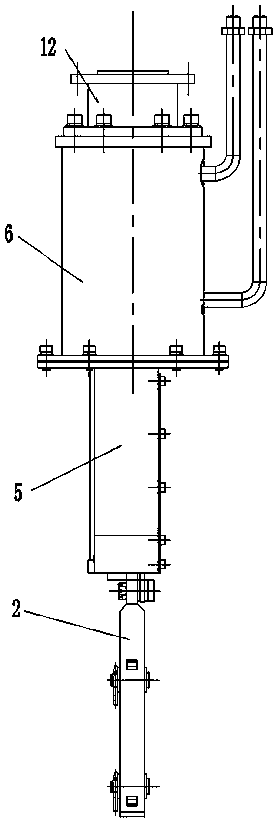
[0011] Such as Figure 1-Figure 4 As shown, the present invention is further described as follows: a center-fixed fast clamping manipulator for forging robots, including a clamp base 5, a heat-resistant cylinder 6 is arranged longitudinally at the rear of the clamp base, and the rear end of the heat-resistant cylinder 6 is fixed with a connection Flange A (connected to the forging robot through connecting flange A); there is an empty slot on the fixture base 5, and the two sides of the empty slot of the piston rod of the heat-resistant cylinder form two connecting parts symmetrically. The front end is horizontally arranged and connected with a high temperature resistant guide rail 11; on the high temperature resistant guide rail 11, there are two sliders 1101 symmetrically supported on the left and right (the slider 1101 belongs to the part of the high temperature resistant guide rail 11), the left jaw fixing seat 2 and the left slider 1101 Fixedly connected, the right jaw fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More