

Calibration method and device for arm length and zero point of SCARA (Selective compliance assembly robot arm) robot, medium and computer device
A zero-point calibration and robot technology, applied in the field of robotics, can solve the problems of convenient and accurate calibration of SCARA robot arm length and zero-point calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to further explain in detail the technical solution of the method and device for calibrating the arm length and zero point of the SCARA robot of the present invention and the effect achieved, the following will first introduce the content related to the SCARA robot.
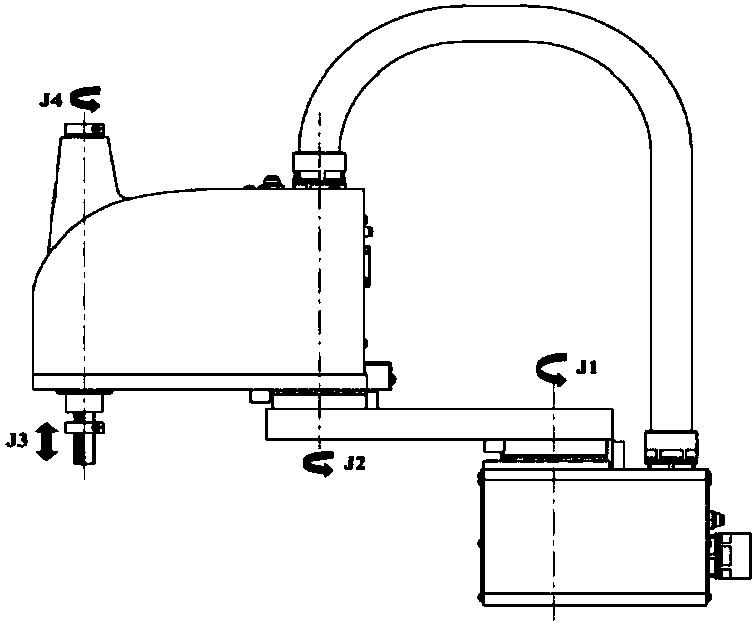
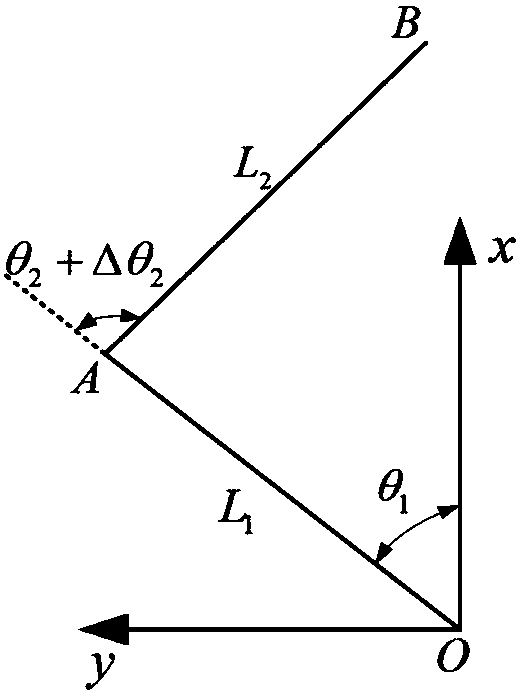
[0050] The SCARA robot has four joints (including three rotation joints around the Z axis and one translation joint along the Z axis), such as figure 1 As shown, since the calibration of the zero point and arm length of the SCARA robot has nothing to do with the three or four joints, it is regarded as a planar two-degree-of-freedom robot here. like figure 2 , OA is the rotary joint, B is the end of the robot, xoy is the base frame of the robot, and the length of the arm is L 1 , forearm length L 2 , joint 1 angle θ 1 , joint 2 angle θ 2 , zero offset value Δθ 2, the positive kinematic solution of the robot is obtained as follows:
[0051]
[0052] For any point P(x,y) in the robot worksp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More