

Target locating method of miniature drone full-strapdown down looking camera
A target positioning and positioning method technology, applied in the field of guidance and control, aircraft navigation, can solve the problems that the platform follow-up camera cannot meet the requirements of launch overload, the camera is large in size and quality, and there is noise in the measurement, so as to increase the reliability of the system performance, improve scalability, and avoid the effect of mechanical movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
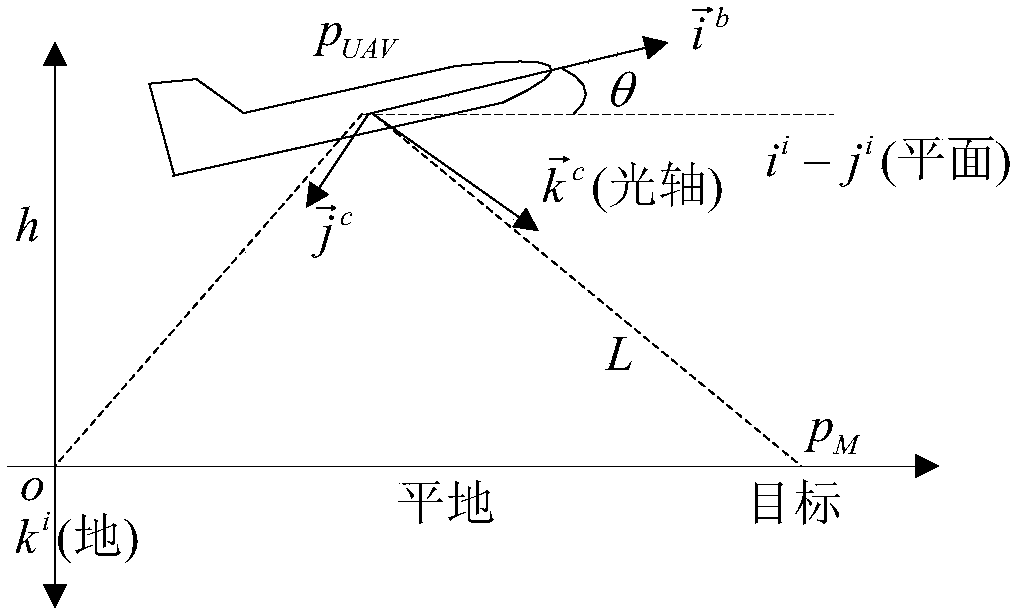
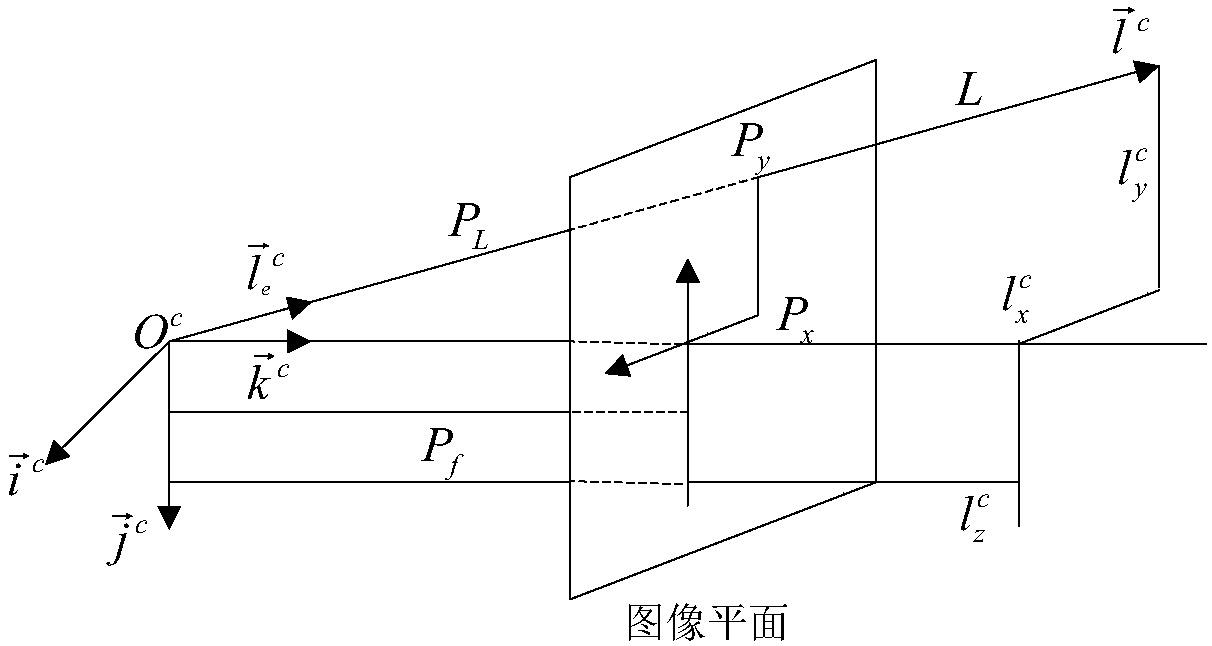
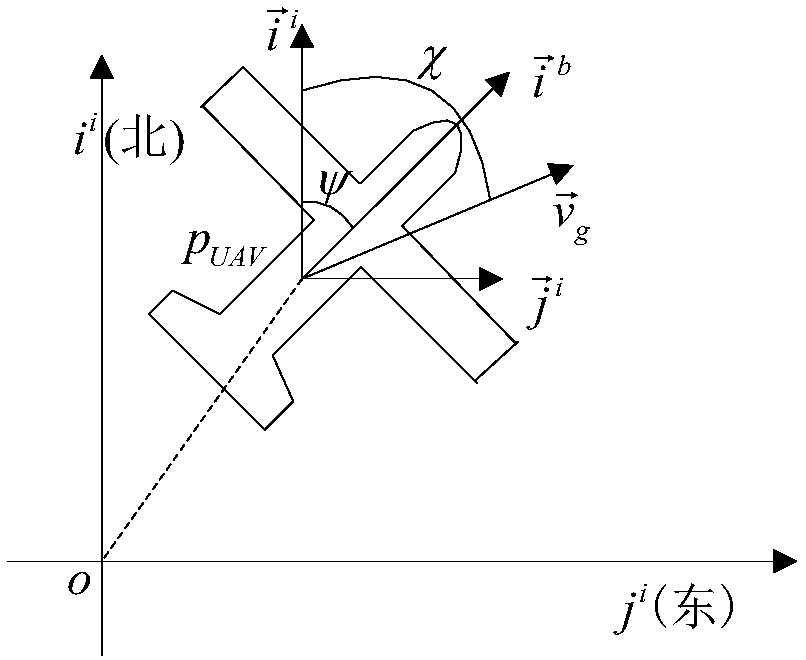
[0049]The present invention provides a target positioning method for a full strapdown downward-looking camera of a micro-miniature unmanned aerial vehicle. figure 1 , 2 and 3, the specific steps are as follows:
[0050] S1 obtains the focal length of the camera, the field of view of the camera is set as η, and the width M of the square pixel array of the camera is known, then the focal length ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More