

Robot slave device, operation system and control method thereof
A robot and controller technology, applied in the field of minimally invasive vascular interventional surgery, can solve problems such as difficulty in meeting the requirements of the co-operation of the catheter and guide wire, difficulty in completing the co-operation of the catheter and the guide wire, and the inability of the robot to adapt to different doctors, so as to facilitate disassembly and replacement. Effects of disinfection, overcoming difficulty in disinfection, improving safety and operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
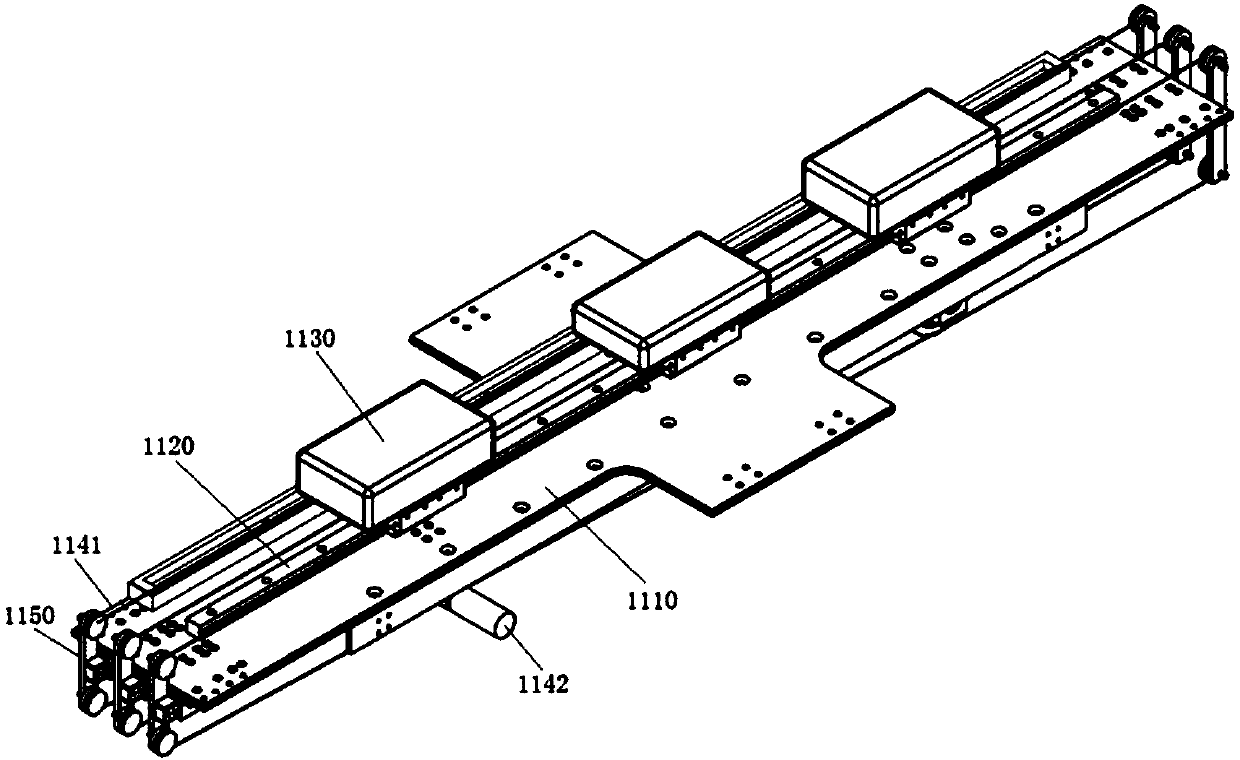
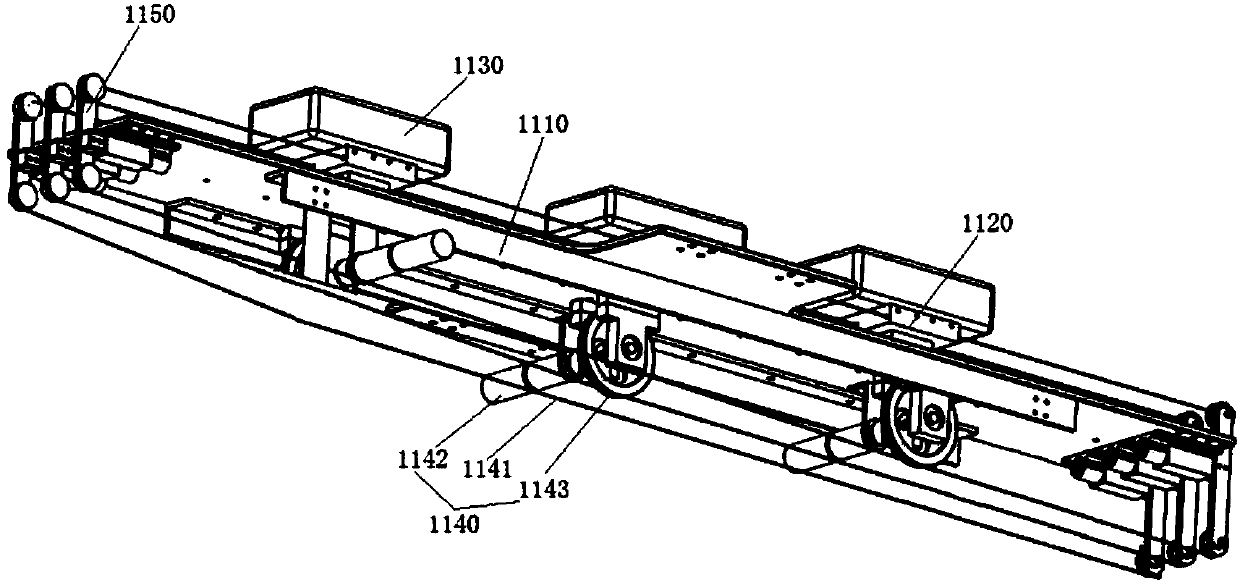
[0076] This embodiment provides a robot slave device. On the operating platform provided with an operating platform 1110 , a platform slider 1130 and a driving mechanism 1140 , a catheter controller and a guide wire controller are respectively installed on the two platform sliders 1030 . Among them, the platform sliders 1130 are set on the operation platform 1110 through the linear guide pair 1020, and each platform slider 1130 is driven independently by the driving mechanism 1140. The number of driving mechanisms is consistent with the number of platform sliders. The catheter controller is used to clamp the catheter and The guide wire controller is used to clamp the guide wire and detect the rotation and push force of the guide wire.
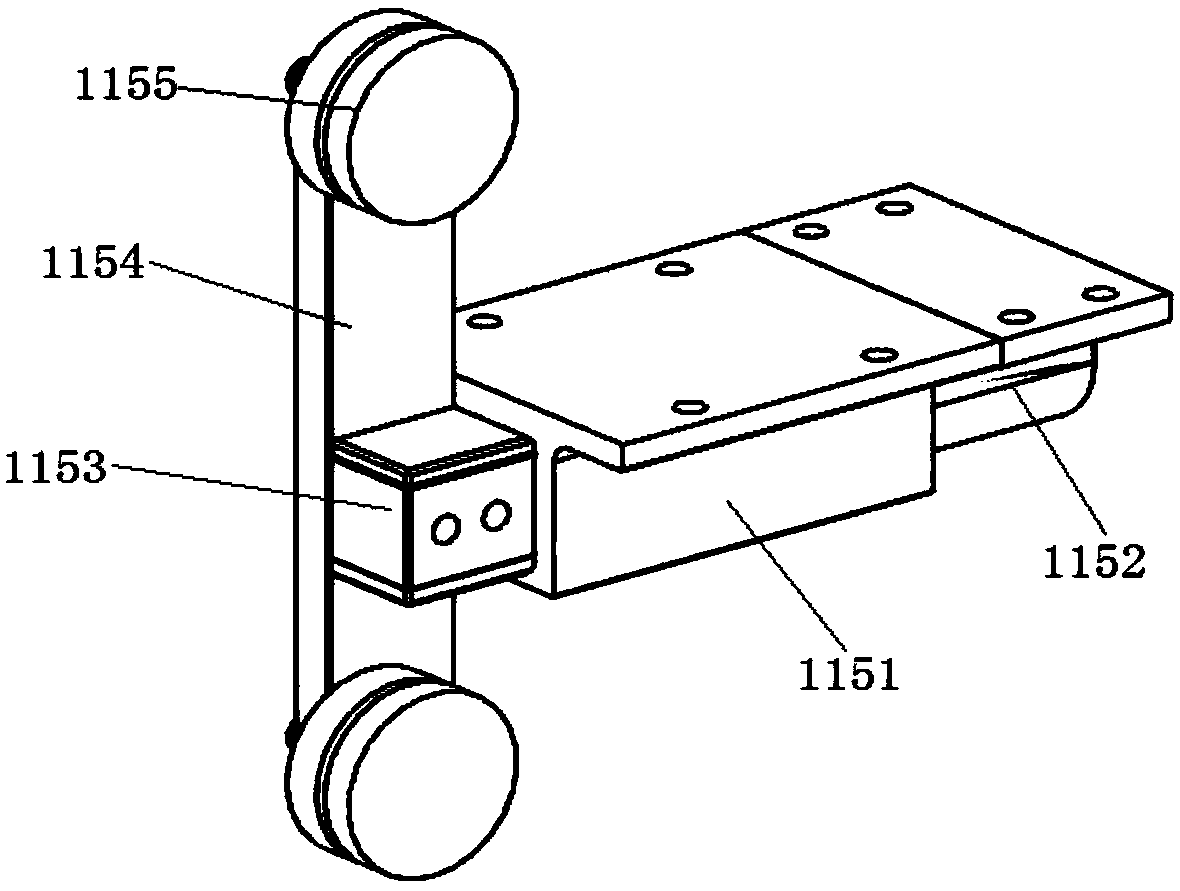
[0077] Each drive mechanism 1140 described includes a drive motor 1142, a rope 1141 and a tensioning mechanism 1150; wherein, the drive motor 1142 is fixed on the bottom of the operating platform 1110, and it is connected with a sheave 1143, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More