Robot and method for identifying road block through robot
A robot and steering gear technology, applied in the field of robots, can solve problems such as difficulty in meeting requirements, inability to identify the types of roadblocks, inability to distinguish sweeping robots, etc., to achieve the effects of convenient disassembly and assembly, stable connection and stable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
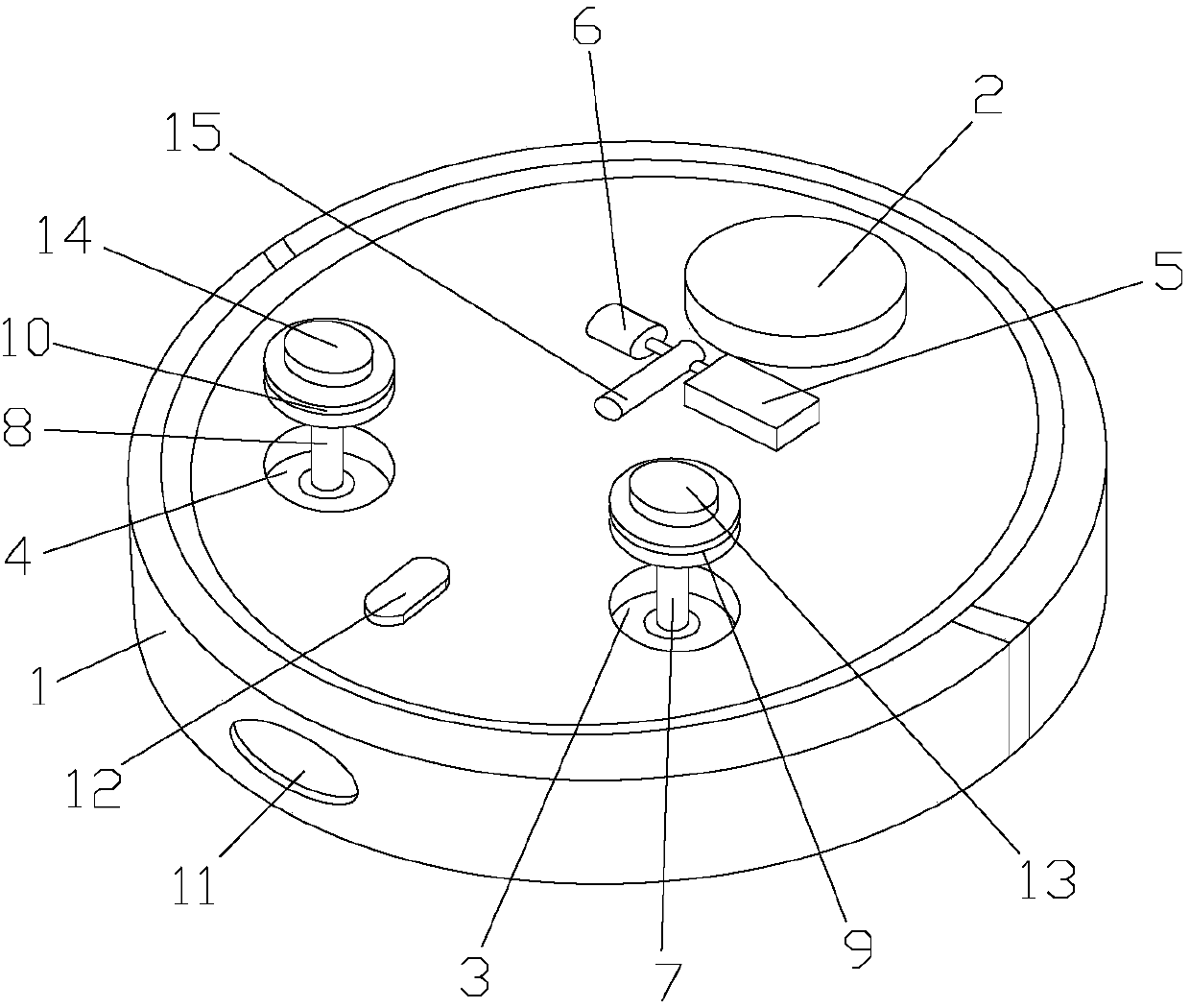
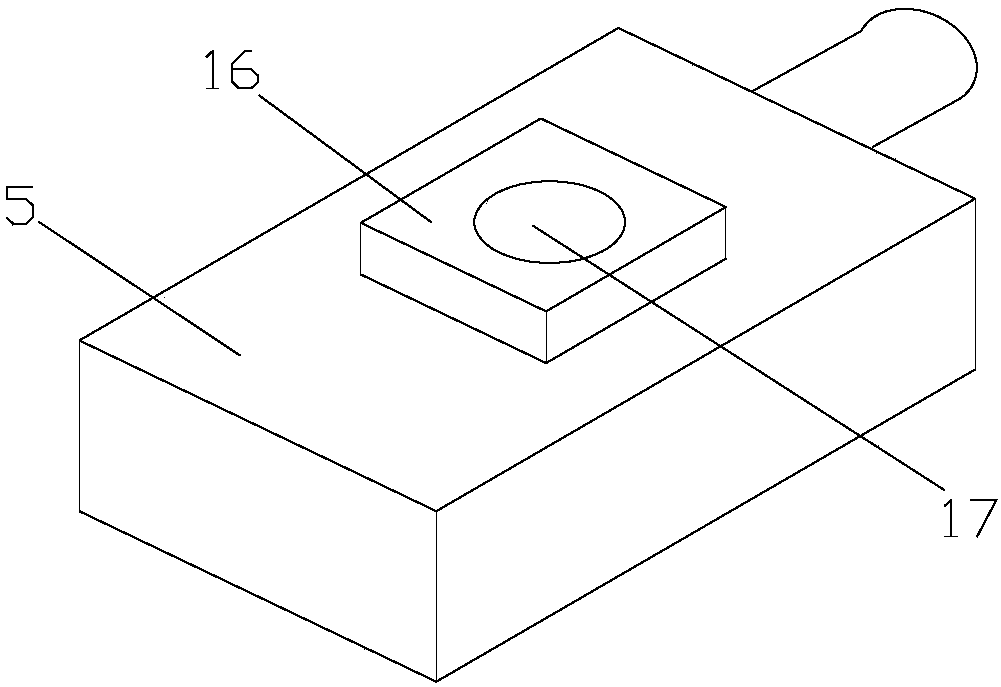
[0028] Such as Figure 1-2 As shown, a robot includes a driving device 1, a control device 2 and an identification system. The driving device 1 is provided with a first storage tank 3, a second storage tank 4, a steering gear 5 and an encoder 6. The first storage tank 3 and the second storage tank 4 are respectively provided with a first electric push rod 7 and a second electric push rod 8, and the ends of the first electric push rod 7 and the second electric push rod 8 are respectively arranged There are a first electric turntable 9 and a second electric turntable 10, and the recognition system includes an obstacle detection sensor 11, a thermal detector 12, a first distance sensor 13, a second distance sensor 14 and a third distance sensor 15, the The first distance sensor 13 and the second distance sensor 14 are fixedly connected with the first electric turntable 9 and the second electric turntable 10 respectively, the third distance sensor 15 is provided with a shaft coupl...
Embodiment 2
[0031] Such as Figure 1-2As shown, a robot includes a driving device 1, a control device 2 and an identification system. The driving device 1 is provided with a first storage tank 3, a second storage tank 4, a steering gear 5 and an encoder 6. The first storage tank 3 and the second storage tank 4 are respectively provided with a first electric push rod 7 and a second electric push rod 8, and the ends of the first electric push rod 7 and the second electric push rod 8 are respectively arranged There are a first electric turntable 9 and a second electric turntable 10, the recognition system includes an obstacle detection sensor 11, a thermal detector 12, a first distance sensor 13, a second distance sensor 14 and a third distance sensor 15, the The first distance sensor 13 and the second distance sensor 14 are fixedly connected with the first electric turntable 9 and the second electric turntable 10 respectively, the third distance sensor 15 is provided with a coupling (not sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



