

A method for drone aircraft image calibration for slope surface measurement
An image calibration and slope technology, applied in image analysis, measurement device, image data processing and other directions, can solve the problems of inability to obtain real-time, poor timeliness, many differences, etc., to improve the accuracy and calibration efficiency, and the calibration method is simple. , the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0104] Such as figure 2 As shown, a UAV aerial image calibration method suitable for slope measurement includes the following steps:
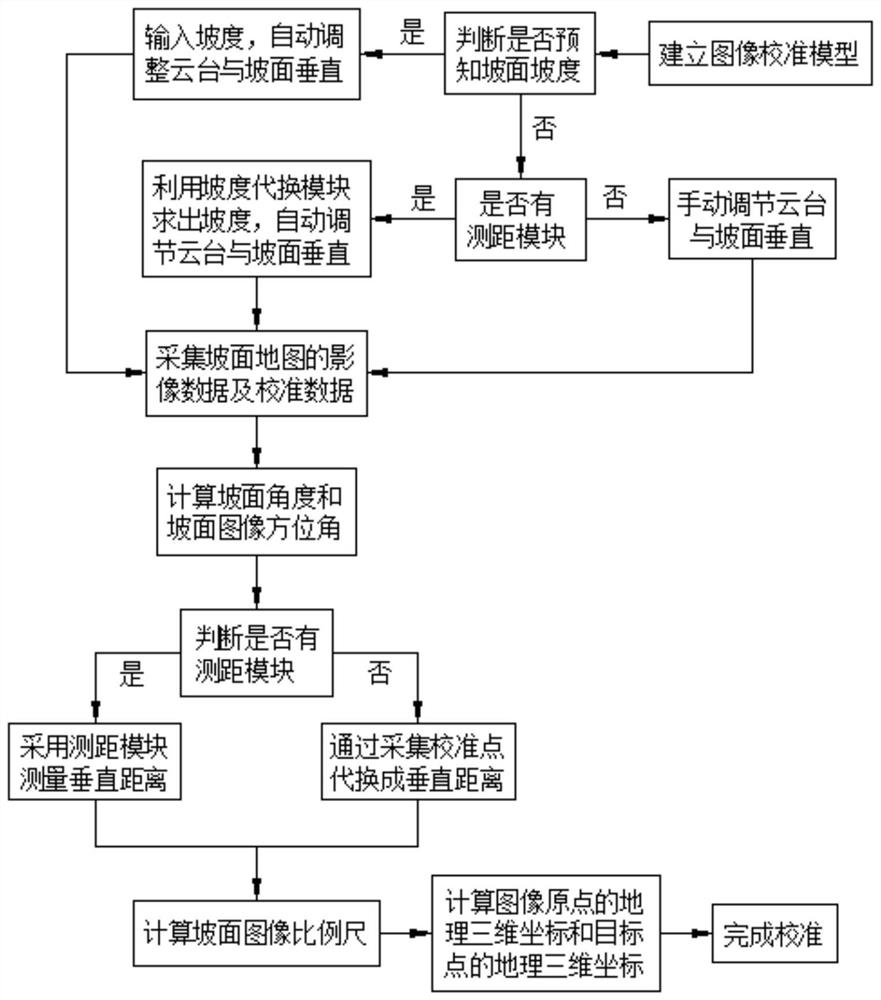
[0105] a. Establish an image calibration model with four parameters: slope angle Slope, slope image azimuth angle Azimuth, slope image scale SlopeScale, and image origin Origin;
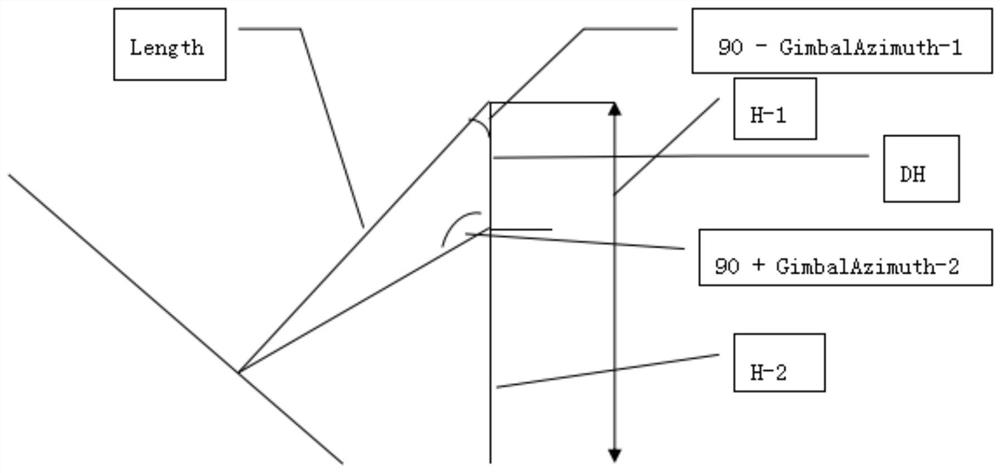
[0106] b. Acquisition of slope images including exposure point pitch angle GimbalPitch-1, exposure point azimuth angle GimbalAzimuth-1, exposure point geographic coordinates DroneLocation-1, exposure point flight height H1, ground station geographic coordinates DeviceLocation-1, and ground station altitude h1 data, and calculate the slope angle Slope and slope image azimuth Azimuth according to the collected data;
[0107] c. After the calculation of slope angle Slope and slope image azimuth angle Azimuth is completed, measure the vertical distance Length;
[0108] d. Determine whether there is a ranging module, if yes, use the ranging module to measure, and obtain...
Embodiment 2
[0123] In this embodiment, on the basis of Embodiment 1, the step b includes the following steps:
[0124] b1. Control the drone to fly above the slope, and keep the horizontal position of the drone unchanged;
[0125] b2. Determine whether the slope is known, if yes, input the slope, automatically adjust the pan-tilt to be perpendicular to the slope, and proceed to step b4; if not, proceed to step b3;
[0126] b3. Determine whether there is a distance measuring module. If yes, use the slope substitution module to find the slope, and automatically adjust the pan-tilt to be perpendicular to the slope, and enter step b4; if not, manually adjust the pan-tilt to be perpendicular to the slope, and Go to step b4;
[0127] b4. When adjusting the flying height of the UAV and the pitch angle of the exposure point until the exposure point is perpendicular to the slope, the acquisition signal is triggered to collect the current slope map image data;
[0128] b5. Record the pitch angle ...
Embodiment 3
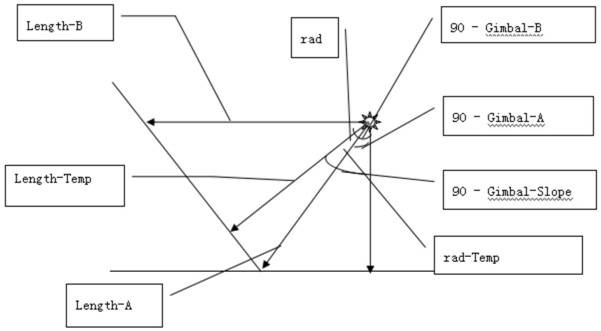
[0134] This embodiment is on the basis of embodiment 1, as image 3 As shown, in the step b3, the specific steps for obtaining the slope angle Slope by using the slope substitution module include:
[0135] b31. Drive the UAV to the area above the slope to be measured to ensure that the slope to be measured is within the viewing range;
[0136] b32. Adjust and fix the position of the gimbal, record the shooting distance Length-A of the calibration point A at the starting position of the slope, the pitch angle Gimbal-A of the exposure point, and the height H-A of the exposure point;
[0137] b33. Record the shooting distance Length-B of the calibration point B on the same level as the gimbal on the slope, the pitch angle Gimbal-B of the exposure point, and the height H-B of the exposure point;
[0138] b34. Obtain the included angle rad between the shooting distance Length-A of the calibration point A and the shooting distance Length-B of the calibration point B according to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More