

A control method for an intelligent exoskeleton robot for lower limb rehabilitation therapy
An exoskeleton robot and control method technology, applied in the control field of rehabilitation medical robots, can solve the problems of not using servo control, failing to meet the needs of patients' rehabilitation, single rehabilitation training mode, etc., and achieve the effect of good dynamic characteristics
Active Publication Date: 2022-06-03
中航创世机器人(西安)有限公司
View PDF11 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
In summary, the existing control systems of exoskeleton devices generally have the following problems: 1) The rehabilitation training mode is single, and the existing exoskeleton rehabilitation robots cannot meet the rehabilitation needs of patients at various rehabilitation stages; 2) Adaptive servo control is not used
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0023] (1) The rehabilitation doctor inputs the personal information of the user (patient) into the PC upper computer.
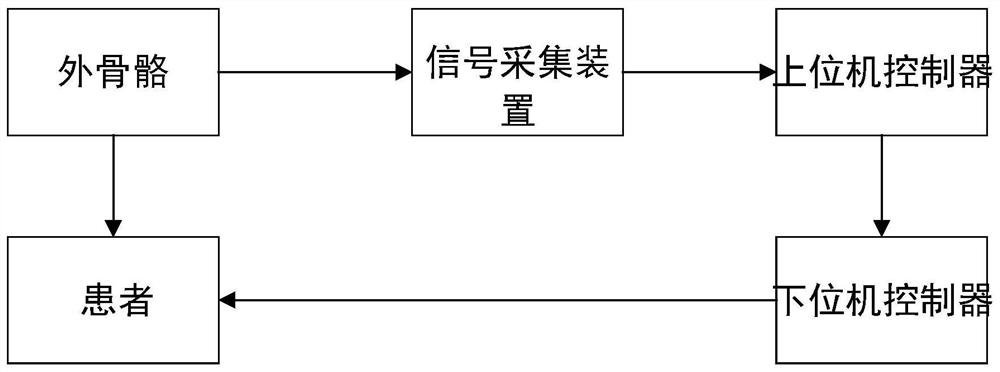
[0029] The upper computer sends the training instruction to the lower computer controller according to the selected rehabilitation training mode. This requires
[0032]
[0033] Among them, i=1, 2, 3, 4, when i=1 is the left hip, i=2 is the left knee, i=3 is the right hip, and i=4 is the right knee.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
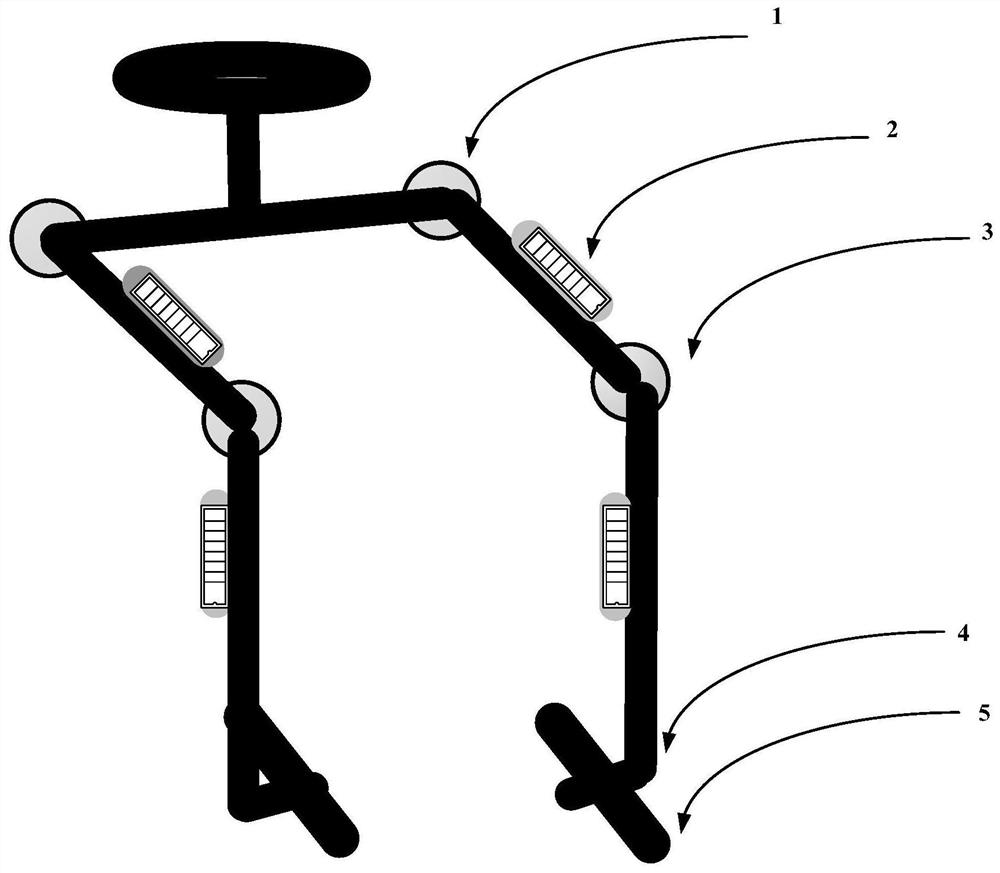
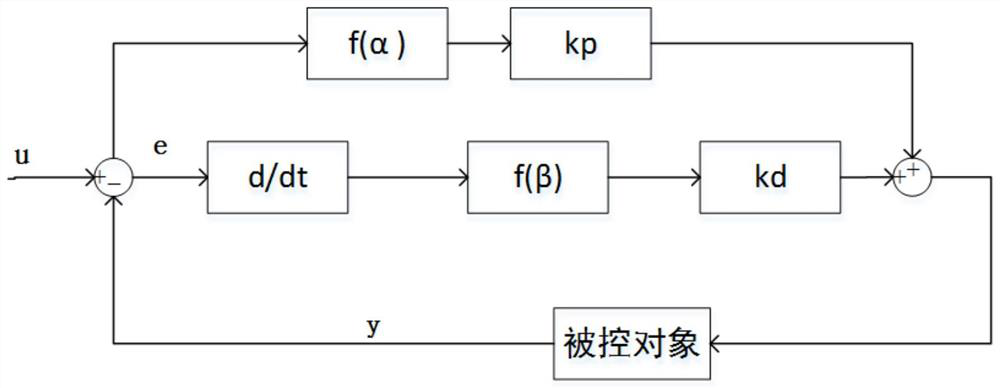
The present invention provides a control method for an intelligent exoskeleton robot for lower limb rehabilitation therapy, which collects the patient's sign information during the patient's movement, including the maximum torque and joint motion of four muscles driving the joint movement of the hip joint and knee joint on both sides of the lower limb. The range of activities and the maximum support force of the lower limbs; the evaluation result variables are calculated, and the patients are treated with passive training mode, power-assisted training mode or follow-up training mode according to different evaluation result variables. The present invention can intelligently select the treatment method adopted by the patient according to the rehabilitation training stage of the patient, so as to adapt to the rehabilitation movement needs of the patient in different rehabilitation stages, so that the underlying motion servo mechanism can have a good performance as the load changes and the speed changes. dynamic characteristics.
Description
A control method of an intelligent exoskeleton robot for lower limb rehabilitation therapy technical field [0001] The present invention relates to the technical field of rehabilitation medical robots, particularly a control method of a rehabilitation medical robot. Background technique [0002] With the development and progress of society and the increasing improvement of living standards, my country is entering an aging stage. In recent years, people There are more and more patients with physical motor dysfunction. Science shows that correct scientific rehabilitation training is important for the recovery of limb motor function. and improvement are very important. Rehabilitation training can not only maintain joint range of motion and prevent joint spasm, but also It can significantly improve the patient's motor function, so as to finally achieve the purpose of recovery. [0003] There are some problems with traditional rehabilitation medical methods. First, a physica...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): A61H1/02A63B23/04A63B21/00A63B24/00B25J9/16
CPCA63B21/00181A63B23/0464A63B24/0087A61H1/0262B25J9/163B25J9/1669A61H2201/5071A61H2201/5058A61H2201/165A61H2201/1642A61H2205/10A63B2220/54A63B2220/56
Inventor张瀚桥贺琛马瑞单丁杨晔王增武
Owner中航创世机器人(西安)有限公司