

Control method of rehabilitation-treatment intelligent exoskeleton robot for lower limb
An exoskeleton robot and rehabilitation treatment technology, which is applied in the control field of rehabilitation medical robots, can solve the problems of not using servo control, failing to meet the needs of patients' rehabilitation, single rehabilitation training mode, etc., and achieve the effect of good dynamic characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
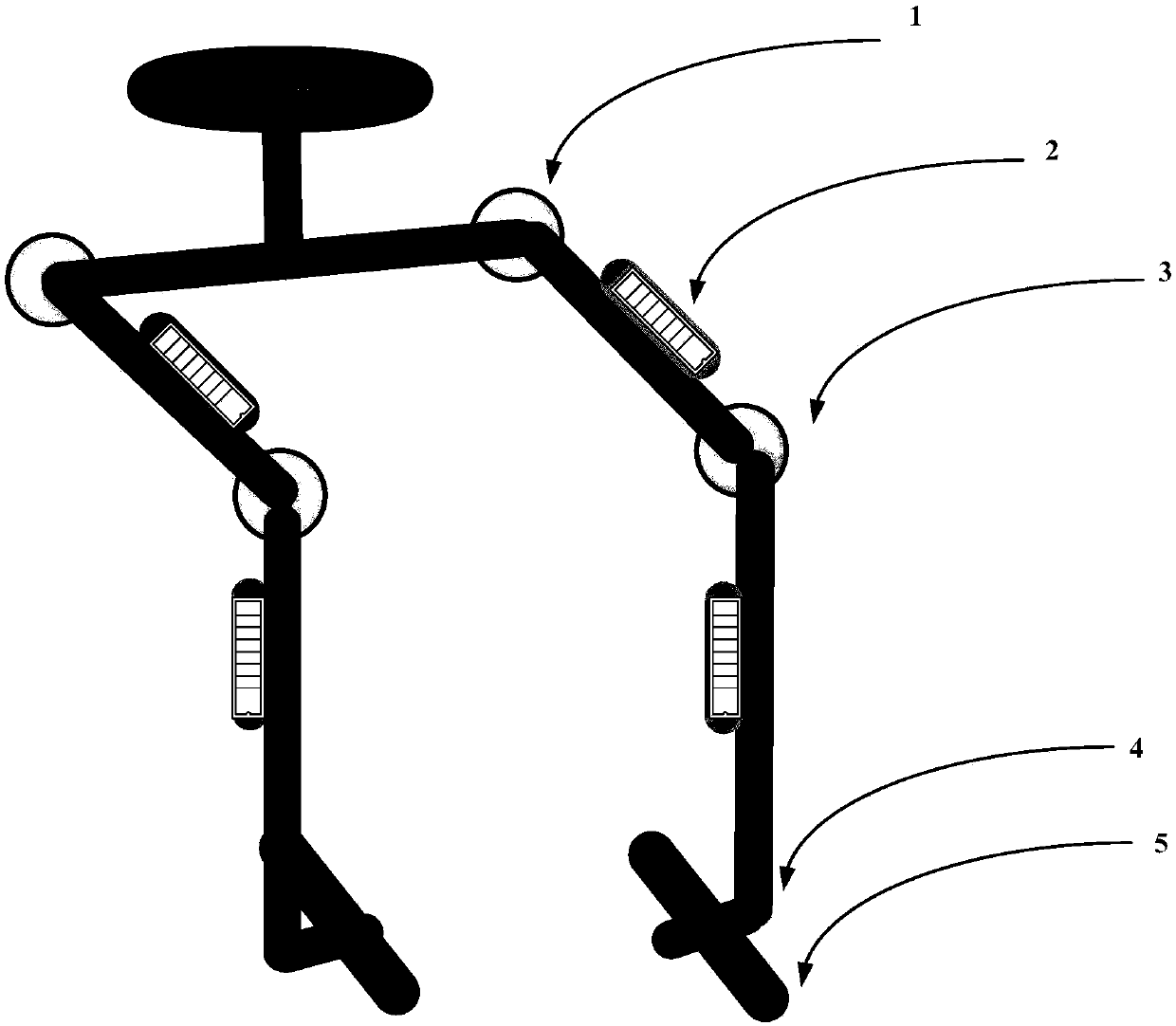
[0022] Embodiments of the present invention propose a control method for an intelligent exoskeleton medical robot for rehabilitation of lower limbs, the steps are as follows:
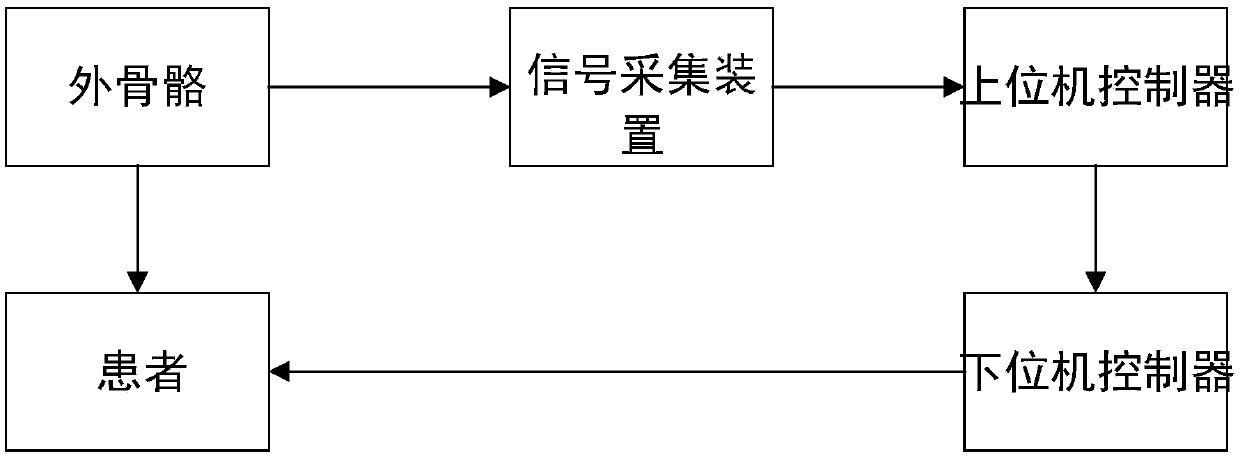
[0023] (1) The rehabilitation doctor inputs the personal information of the user (patient) into the PC host computer.
[0024] (2) Retrieve the patient rehabilitation database, and select a training mode suitable for the patient according to the patient's rehabilitation stage stored in the system. Specifically: during the exercise process, the patient’s physical sign information is collected, including the maximum torque, range of motion of the joint and the maximum support force of the lower limbs driven by the four muscles of the bilateral hip joint and knee joint of the lower limbs. Among them, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More