

Intelligent type barrier avoiding grabbing system based on deep learning
A deep learning and intelligent technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to accurately judge the type of objects and the inability to achieve accurate positioning, achieve simple implementation and maintenance, improve the degree of intelligence, Simple and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
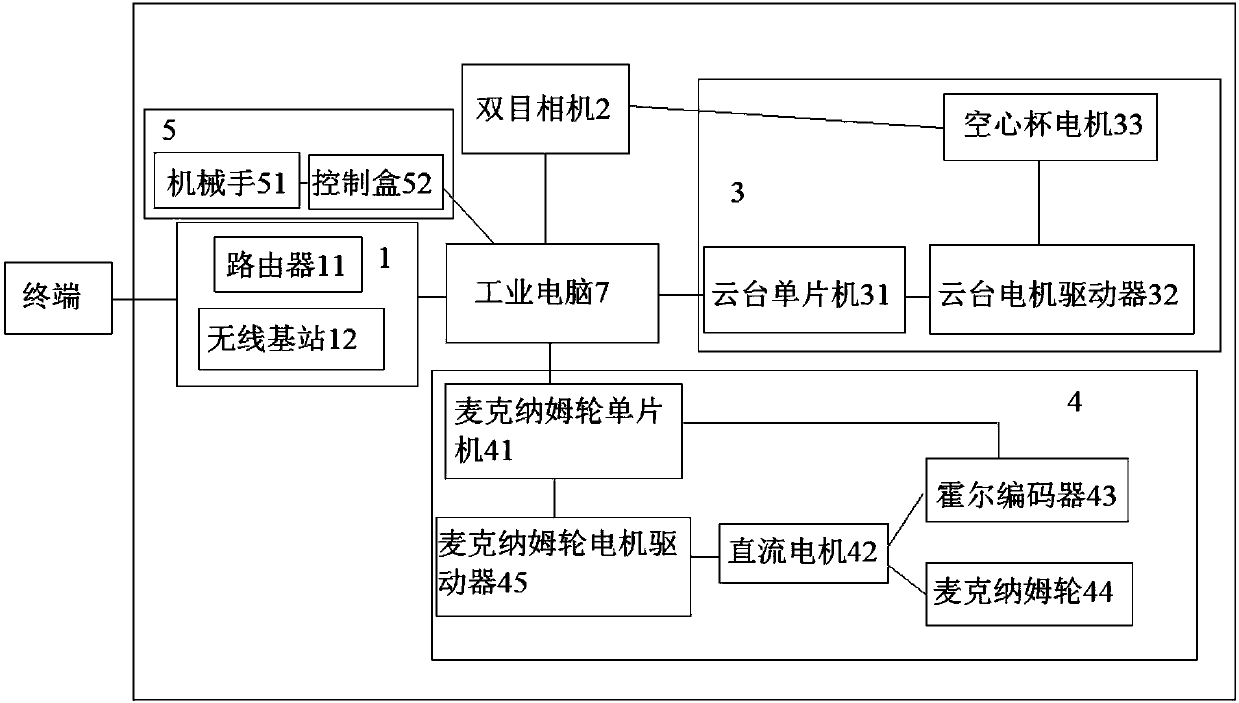
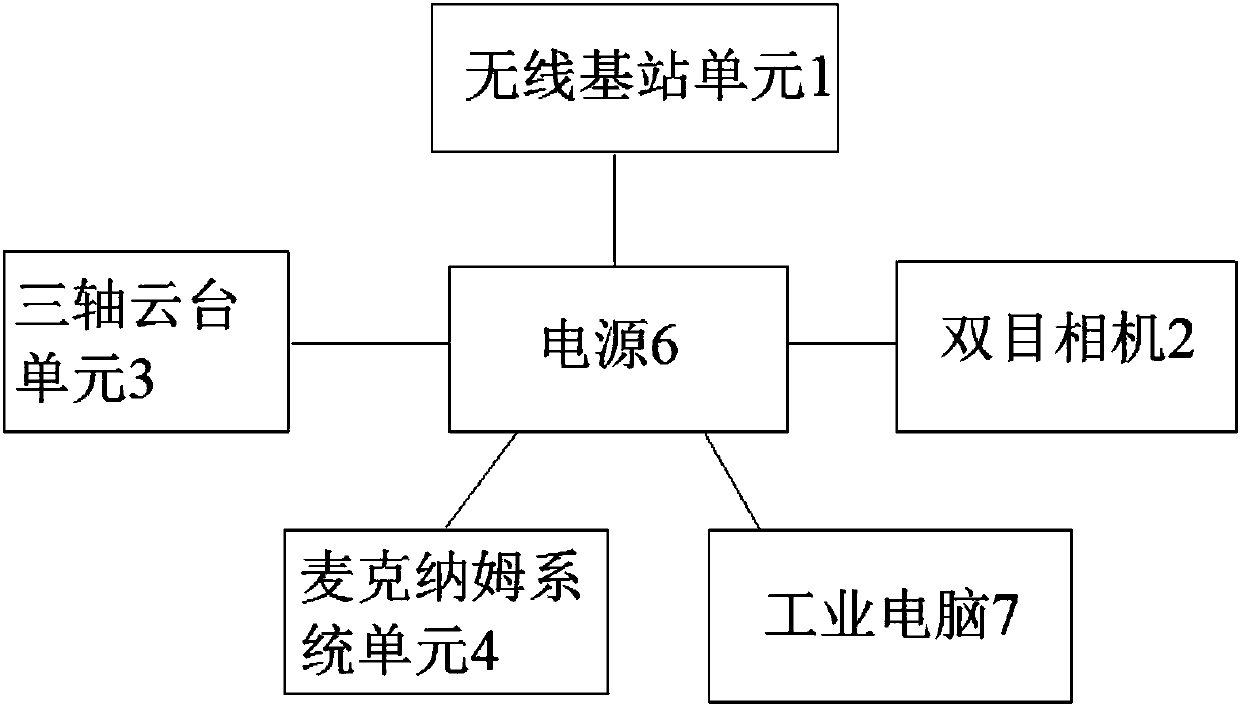
[0015] The present invention provides an intelligent obstacle avoidance and grasping system based on deep learning (referred to as the system, see Figure 1-2 ), characterized in that the system includes a wireless base station unit 1, a binocular camera 2, a three-axis pan-tilt unit 3, a mecanum system unit 4, a manipulator unit 5, a power supply 6 and an industrial computer 7; The eye camera 2, the three-axis pan-tilt unit 3, the mecanum system unit 4, the manipulator unit 5 and the industrial computer 7 are connected to supply power to them; the industrial computer 7 is connected to the external terminal through the wireless base station unit 1; the binocular Camera 2, three-axis pan-tilt unit 3, Mecanum system unit 4, and manipulator u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More