

Obstacle-crossing mechanism control system and control method for inspection robot of power transmission line
A technology for inspection robots and control systems, applied to overhead lines/cable equipment, etc., can solve the problems that robots cannot pass, the size of the upper part is too large, and the size of the lower part is too large, so as to improve the efficiency of obstacle crossing, simple action and avoid falling off. falling effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below in conjunction with accompanying drawing, the present invention is described in detail.
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
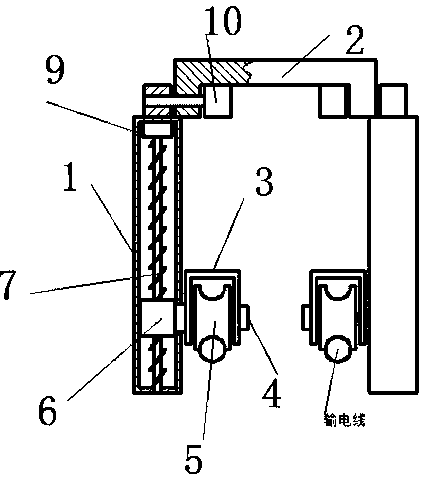
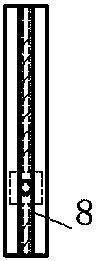
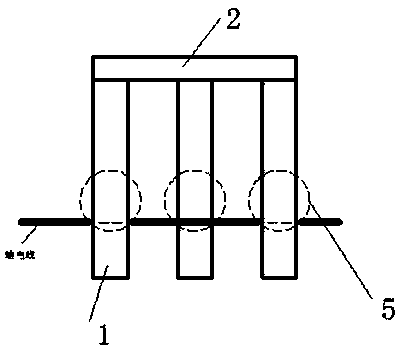
[0025] An obstacle-surmounting mechanism of a transmission line inspection robot, which includes a body 2, the body 2 is set on the transmission line through the support of the front traveling mechanism, the middle traveling mechanism and the rear traveling mechanism; wherein each traveling mechanism includes a support Arm 1 and walking wheel 5, the upper end of support arm 1 is connected on the body 2 through the rotation of the swing shaft, and the swing shaft is connected with the swing motor 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More