

A Plane Space Orientation Method for Robot
A technology of plane space and positioning method, applied in the field of visual positioning, which can solve the problems of low positioning reliability, nonlinear signal attenuation and poor stability, and low amount of calculated data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to solve the shortcomings of the existing positioning methods, the invention provides a robot positioning method based on an angle bar code.
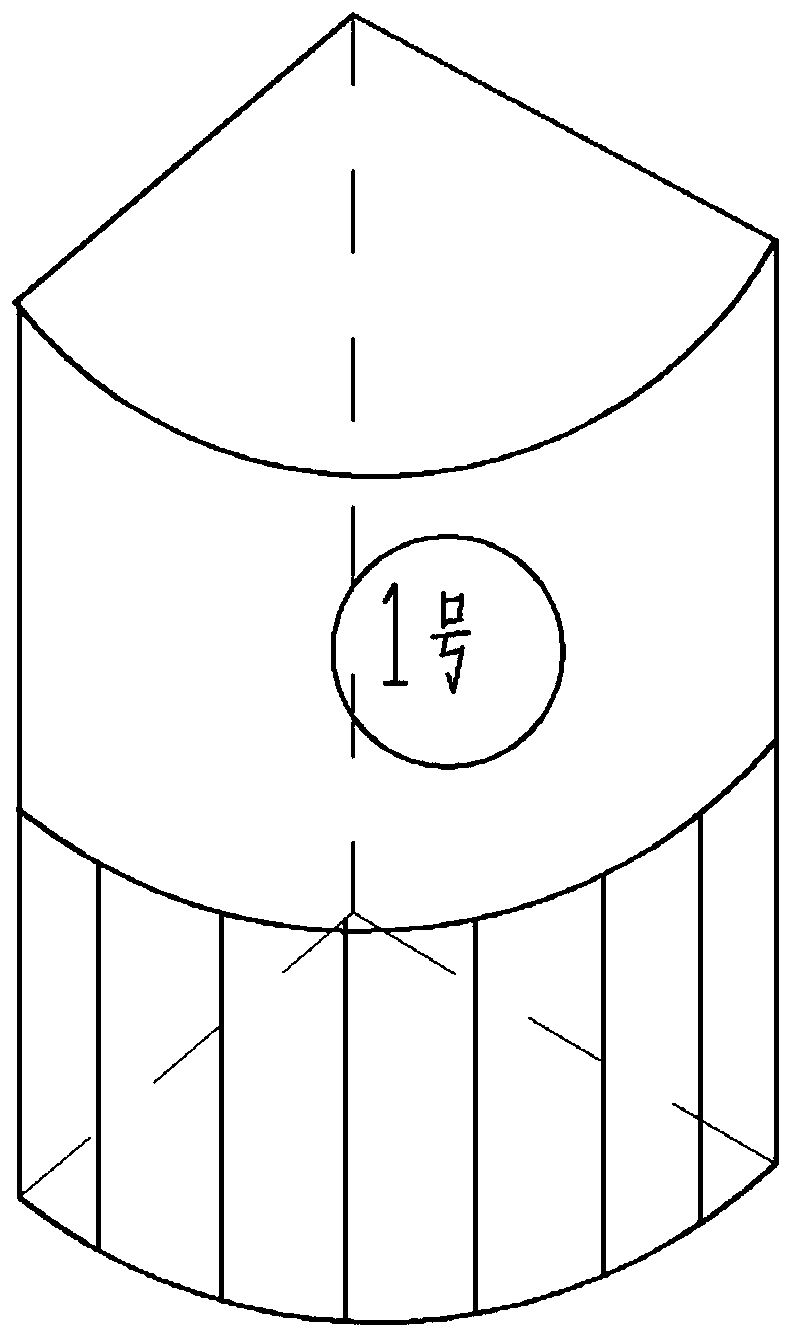
[0056] 1. Angle barcode device
[0057] The structure of the angle barcode device is attached figure 1 , the encoder is a 1 / 4 cylindrical structure, the upper part is the angle barcode number, and the lower part is provided with black and white stripes with the same interval. Each set of space positioning device is equipped with at least two angle barcodes according to the degree of responsibility for the required space. The angle barcodes are made of plastic molding, and the cost is low. Configuring multiple encoders will not lead to an increase in cost.
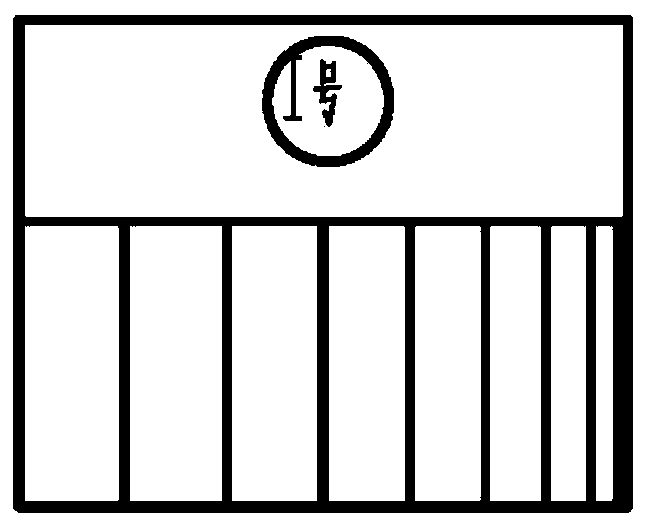
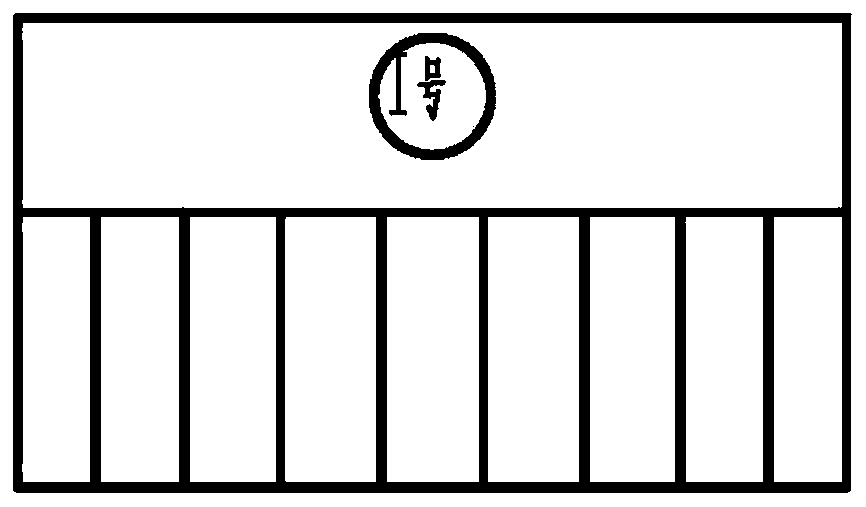
[0058] The angle barcode works mainly through the principle of unevenness of the vertical lines caused by the difference of the viewing angle at different angles. For details, see Figure 2-4 , you can see the different fringe images corresponding to the angle barco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More